
Améliorer la vie étudiante au foyer
Foyer, fablab : 2 lieux voisins et qui voient passer beaucoup d’étudiants en dehors des cours !
Voici quelques réalisation faites pour le foyer par les machines du fablab




Des rectangles en PMMA découpés au laser et des vinyles adhséifs colorés préparés avec la découpeuse vinyle pour rendre plus visible l’étiquettage des bacs de tri

20 jetons SAM en bois pour les soirées arrosées ! Les clés de voiture du SAM n°x sont déposées dans un casier numéroté en échange d’un jeton en bois découpé et gravé à la découpeuse laser. En fin de soirée le jeton SAM n°x est échangé contre un éthylotest puis contre les clés de voiture si le test est bon.
200 jetons en bois découpés et gravés à la découpeuse laser avec un trou excentré pour passer un serreflex. 1 jeton x est fixé sur chaque cintre du vestiaire, 1 autre jeton numéroté x également est donné en échange de la veste puis ré-échangé contre la veste en fin de soirée.
Projet CoOC : Robot de suivi automatique des stocks
Equipe:
- Apia Moya
- Hoang Duong
- Tanguy De Lanversin
I. Contexte:
L’industrie textile s’est transformée depuis quelques décennies. Innovations, scandales, nouvelles collections de sandales se succèdent à un rythme toujours plus rapide, fast fashion oblige! Une innovation particulière qui conquiert des parts de marché toujours plus nombreuses a particulièrement retenue notre attention: la RFID. Les étiquettes RFID ont peu à peu trouvé leur place dans le magasins, elles permettent de superviser les stocks plus facilement et rapidement, d’avoir une meilleure traçabilité sur les produits (provenance, authenticité…) et tout cela à des prix qui ne font que diminuer.
Dans le cadre de notre projet CoOC de 2e année, nous avons donc réalisé un objet communicant en lien avec cette technologie RFID, répondant à un besoin concret de l’industrie textile. Nos enquêtes terrains nous ont en effet menées sur un sujet que l’on ne pensait pas aborder: la gestion des stocks. En interrogeant des salariés de magasins de vêtements et notamment suite à une entrevue avec une responsable de rayon chez Decathlon, nous nous sommes aperçus que tout le potentiel des étiquettes RFID n’était pas encore pleinement exploité. Aujourd’hui les salariés vont encore dans les rayons et les réserves pour scanner manuellement à l’aide d’une raquette RFID les produits en stock. C’est ce constat qui nous a poussé à réfléchir à une manière innovante, fiable et précise de gérer les stocks.
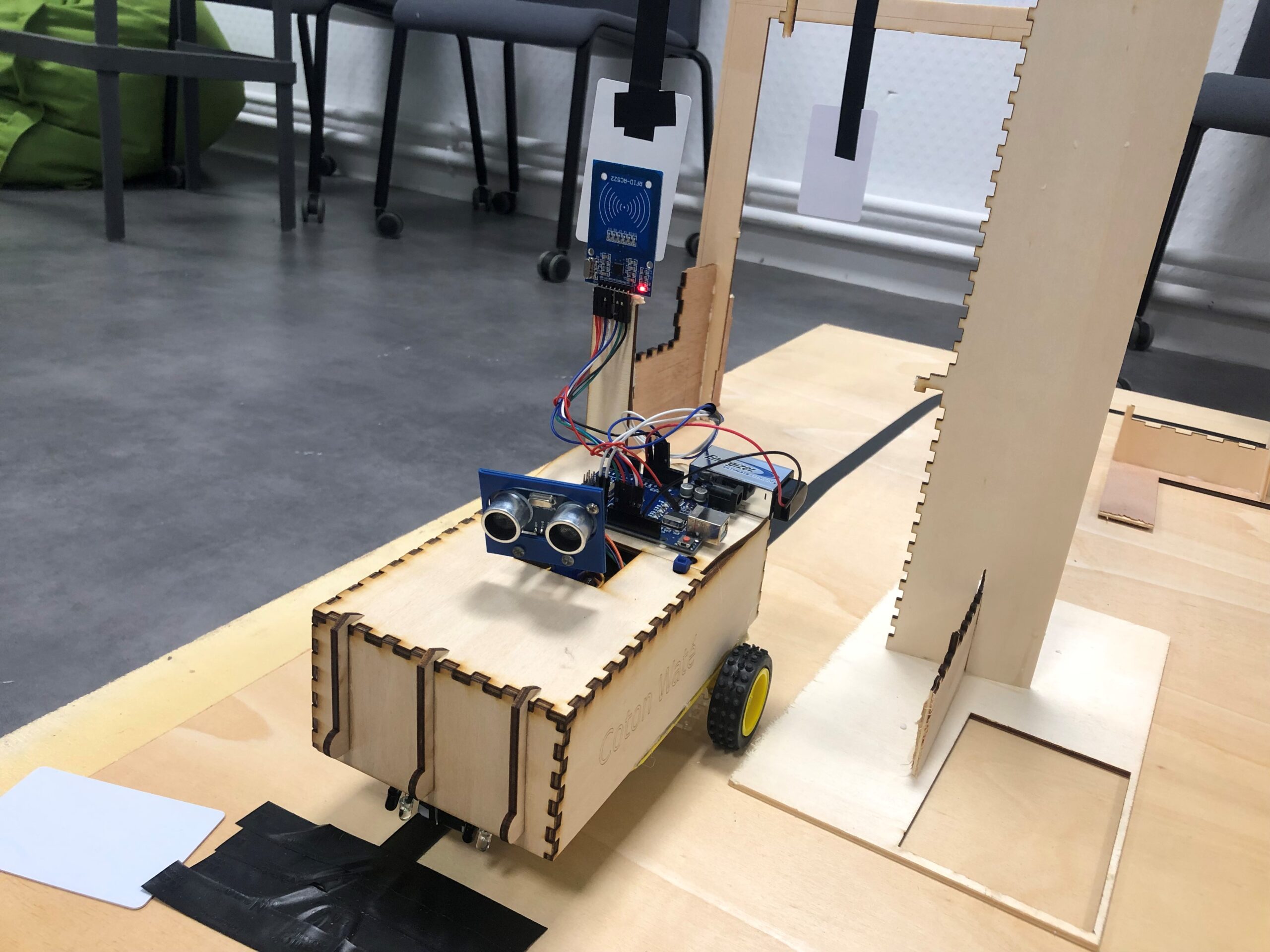
Nous avons alors conçu un robot capable de suivre un chemin prédéfini (ici une bande au sol) pour parcourir des rayons, une réserve, un entrepôt tout en scannant les étiquettes RFID à proximité pour alimenter et mettre à jour la base de données où figurent les stocks de l’entreprise. Ce suivi automatisé des stocks permettraient d’éliminer la tâche rébarbative de scan et mise à jour des stocks pour les opérateurs, leur permettant ainsi de consacrer plus de temps sur le terrain pour conseiller les clients, arranger les rayons ou contribuer à d’autres tâches moins ingrates.
Dans l’industrie textile, les entreprises utilisent très majoritairement des étiquettes équipées d’antennes RFID UHF passives, cette technologie alliant robustesse, finesse et surtout une capacité de détection de l’ordre de plusieurs mètres (selon la puissance du lecteur). Pénurie de composants oblige, nous n’avons pu travailler sur du RFID UHF et nous sommes donc tournés vers du RFID NFC dont le matériel était disponible au fablab de l’école.
II. Notre robot en détails
A. Vidéo explicative du fonctionnement du robot | Mise en situation
B. Construction de la coque
Nous avons décidé de concevoir la coque du robot à l’aide de la découpe laser du fablab. Certaines parties avaient été designées avec Tinkercad pour être imprimées en 3D (charnières) mais les délais pour imprimer en 3D étaient trop longs à cause d’une forte demande de la part des élèves. Nous avons donc construit toute la coque en contreplaqué avec la découpe laser, nous avons utilisé des serre-joints pour les pièces mobiles.
La coque se devait d’être suffisamment rigide pour résister à des chocs minimes et pour maintenir certains composants électroniques bien en place. Certaines parties de la coque s’emboîtaient, d’autres nécessitaient d’utiliser de la colle à bois (pour renforcer la liaison ou maintenir 2 surfaces lisses ensembles)
La découpe laser est une Rayjet Trotec pilotée par le logiciel Corel Draw 2018. La coque a été conçue avec le logiciel Inkscape (version 1.1), le fichier a été exporté au format SVG pour la découpe.
Les lignes doivent respecter ces propriétés pour préparer les fichiers de dessin [1]:
- Découpe: tracer des lignes rouges (épaisseur: Ligne Très fine ou 0,05mm / rouge pur RGB 255;0;0)
- Gravure: Formes/Lignes/Dessins (vectorisés de préférence) en noir ou en niveau de gris.
La taille du plateau de la Rayjet (donc de découpe max) : 457 x 305 mm
Les dessins de la coque et des charnières ont été déposés sur un drive ouvert à tous avec le lien suivant: https://drive.google.com/drive/folders/1_IyIeHGhq1p6IS1zDbmX_LJn9qIRJx86?usp=share_link
C. Diagramme d’architecture matérielle/logicielle:
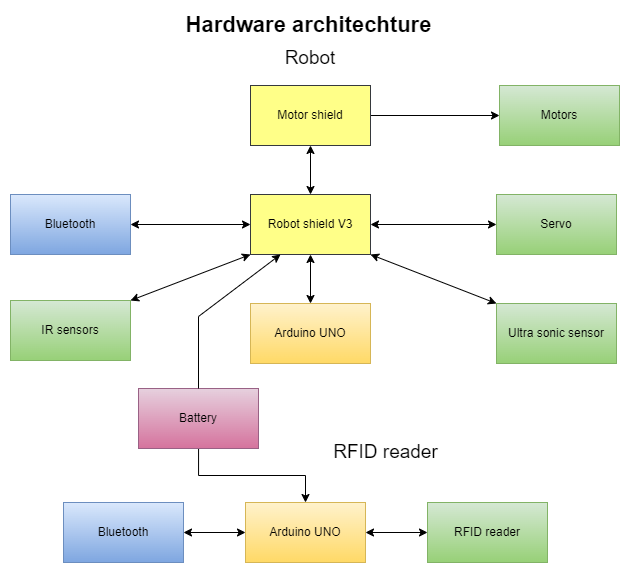
D’architecture matérielle
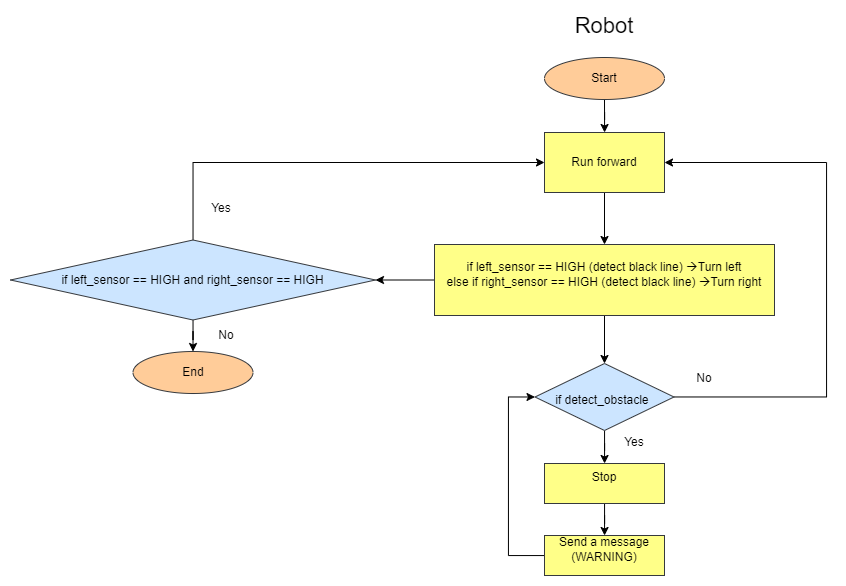
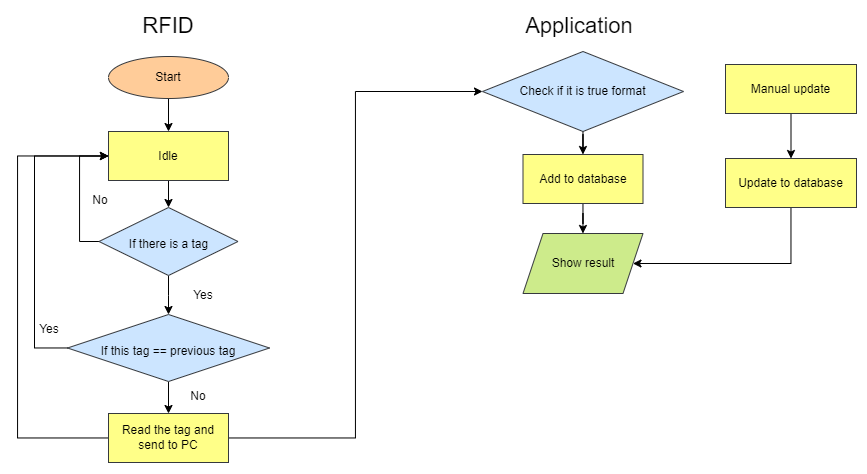
Organigramme du Robot, RFID et Application
D. Matériel utilisé et montage électronique
Liste des matériels:
- 2 arduino UNO, 1 shield I/O (Basic IO shield), 1 shield de moteur (Rotoshield Motor Driver Shield for Arduino)
- 2 capteurs IR : MH FC-51 (Breakout Receiver IR)
- 1 capteur ultrasons : HC-SR04
- 2 modules Bluetooth HC-05 (Silver Mate Bluetooth)
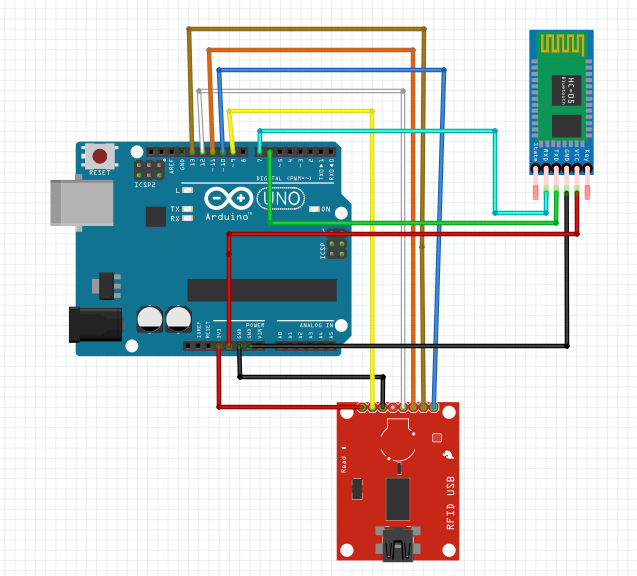
- 1 lecture RFID : RC522
- 1 servomoteur
- batterie 9V, 4 pilles 1.5V
Le schéma de robot: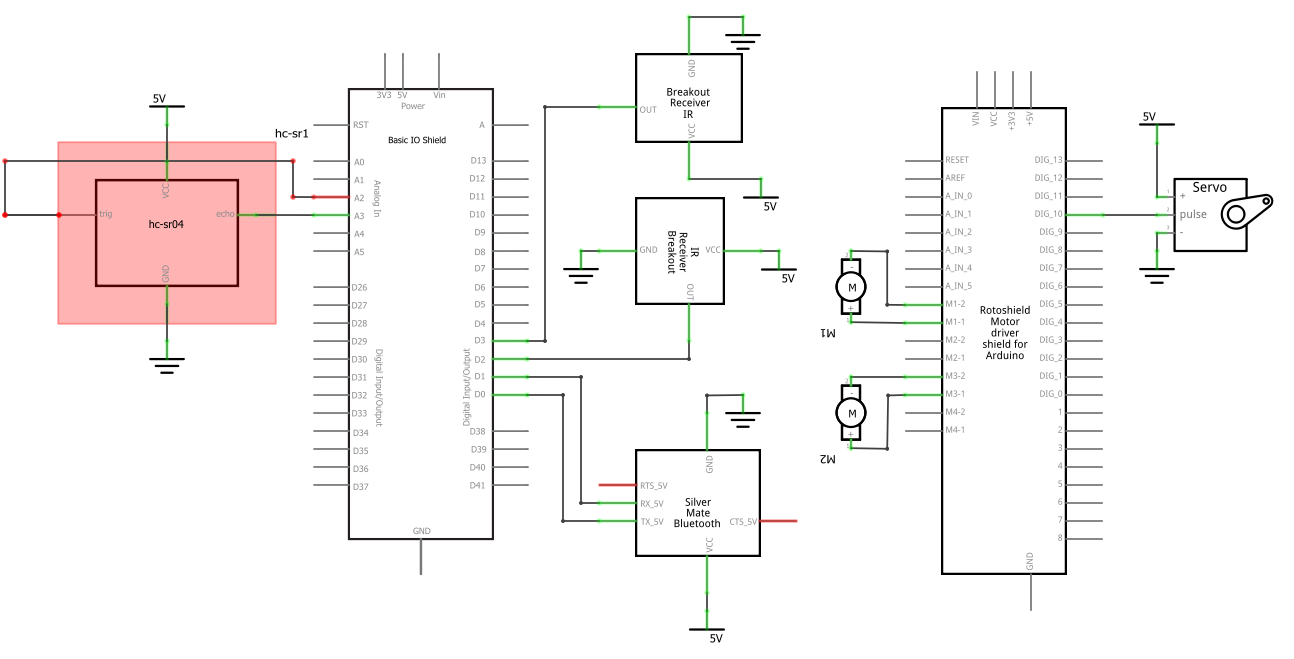
En fait, on a combiné 3 cartes: Arduino + I/O Shield (Augmenter des ports) + Motor Shield.
Le schéma de RFID lecture:

E. Plus informations sur Github: le lien de Github inclut le code source
III. Perspectives:
Nous avons pu identifier plusieurs perspectives d’amélioration de notre prototype:
- Monter et adapter un lecteur RFID UHF à notre robot pour envisager des tests à plus grande échelle sur le terrain
- Améliorer l’autonomie du robot et monter un système de batterie rechargeable plutôt que de changer les piles. Il est important de noter qu’en passant sur une technologie RFID UHF, le robot aura besoin de bien plus de puissance pour fonctionner, il faudra sans doute redimensionner toute l’alimentation du robot.
- Alimenter la base de données où figure nos stocks en passant pas un réseau wifi (et non une antenne bluetooth) pour augmenter la portée et pouvoir déployer le robot dans des magasins, entrepôts pouvant atteindre plusieurs milliers de mètres carrés de surface au sol
- Simplifier l’architecture électronique du robot, nous avons utilisé 2 cartes Arduino, 2 modules bluetooth pour des raisons pratiques de développement. On pourrait supprimer certains composants redondants pour réaliser une nouvelle architecture plus sobre et efficiente.
Références:
[1]Telefab IMT Atlantique : https://telefab.fr/les-machines/decoupe-laser/
[2]Guidage RFID: https://www.electronique-mixte.fr/microcontrolleurs/rfid-controle-dacces-par-badge-avec-arduino/
[3]Building an easy Line Follower Robot using Arduino UNO: https://circuitdigest.com/microcontroller-projects/arduino-uno-line-follower-robot
[4]A line follower robot from design to implementation: Technical issues and problems: https://www.researchgate.net/publication/224132741_A_line_follower_robot_from_design_to_implementation_Technical_issues_and_problems
[5]Designing and Building a Line Following Robot: https://www.cs.york.ac.uk/micromouse/Papers/Building-a-line-following-robot.pdf
[6]Line Follower and Obstacle Avoiding Robot: https://create.arduino.cc/projecthub/embeddedlab786/line-follower-and-obstacle-avoiding-robot-baa2bb
Lien de la vidéo explicative du fonctionnement de notre robot: https://www.canva.com/design/DAFU3gN9cAY/KLp6XCv7cG02qRxa4Pgxzg/watch?utm_content=DAFU3gN9cAY&utm_campaign=designshare&utm_medium=link&utm_source=publishsharelink
Lien du code git: le lien de Github inclut le code source
Lien du drive contenant les dessins de la coque et des charnières: https://drive.google.com/drive/folders/1_IyIeHGhq1p6IS1zDbmX_LJn9qIRJx86?usp=share_link
Zanimo – Solution Technique
Equipe
Divya RAMDOO
Le Kim NGUYEN
Moussa OYEWOLE
Maxime RICORDEAU
I. Contexte
Dans le cadre de la thématique d’approfondissement CoOC (Conception d’Objets Communicants), notre équipe pluridisciplinaire s’est intéressée à la problématique de la perte d’animaux. En effet, 70 000 animaux ont été déclarés perdus ou abandonnés en France en 2021. Pour participer à la résolution de cette problématique, nous nous sommes concentré sur la réalisation d’une solution basée sur un collier traceur.
Dans cet article, nous nous efforcerons à vous expliquer le cheminement de la création de cette solution étape par étape.
II. Réalisation
1. Liste des matériaux
- Expansion Boards : Pytrack 2.0 X
- Development Boards : LoPy4
- Antenna Kit x2 (ou de plus petit format si possible)
- Batterie Lipo Rechargeable, 3.7V, 1200mAh, 603450 (ou autre batterie 5V)
2. Electronique
Premièrement, assurez-vous d’avoir un logiciel de programmation tel que Visual Studio Code et de l’extension Pymakr, qui permet de reconnaître la LoPy4.
a. Gateway (passerelle)
Après avoir connecté la carte LoPy4 au moyen d’un câble USB, suivez les instructions qui suivent, pour communiquer avec cette dernière, et lancer un 1er programme en python : Getting Started.
Dans notre githlab vous trouverez ensuite un dossier “lorawan-nano-gateway” contenant tous les éléments pour configurer la gateway. Vous pourrez ainsi connecter une carte LoPy à un réseau LoRaWAN tel que The Things Networks (TTN), afin de l’utiliser comme une nano-gateway.
Ce code utilise des paramètres spécifiques pour la connexion au TTN dans la région européenne de 868 MHz. Pour le configurer en fonction de votre utilisation spécifique, veuillez consulter le fichier config.py.
Le code de la Nano-Gateway est divisé en 3 fichiers, main.py, config.py et nanogateway.py. Ces fichiers sont utilisés pour configurer et spécifier comment votre passerelle se connectera à votre réseau préféré et comment elle peut agir en tant que transitaire de paquets.
Main (main.py)
Ce fichier s’exécute au démarrage et appelle les fichiers library et config.py pour initialiser la nano-gateway. Une fois la configuration définie, la nano-gateway est alors démarrée.
Configuration (config.py)
Ce fichier contient les paramètres spécifiques au serveur et au réseau auquel il se connecte. En fonction de votre région et de votre fournisseur (TTN, Loriot, etc.), ces paramètres varient.
Library (nanogateway.py)
La bibliothèque nano-gateway contrôle toute la génération et la transmission des paquets pour les données LoRa.
Ensuite, pour configurer la passerelle avec The Things Network (TTN), il faut créer/enregistrer un compte, comprenant un nom d’utilisateur et une adresse électronique. Une fois le compte créé, vous pouvez commencer à enregistrer votre nano-gateway. Pour ce faire, vous devez vous rendre sur la page Web de la console TTN.
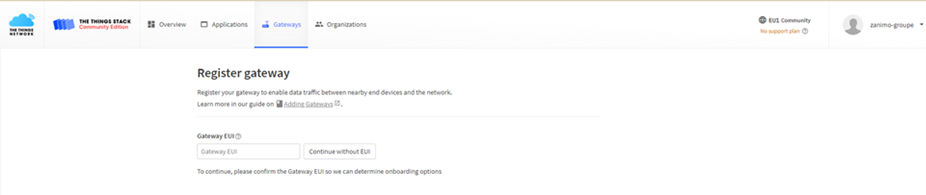
Dans la console TTN, vous avez deux options : applications et passerelles. Sélectionnez passerelles, puis cliquez sur enregistrer une passerelle. Cela vous permettra de configurer et d’enregistrer une nouvelle nano-gateway.
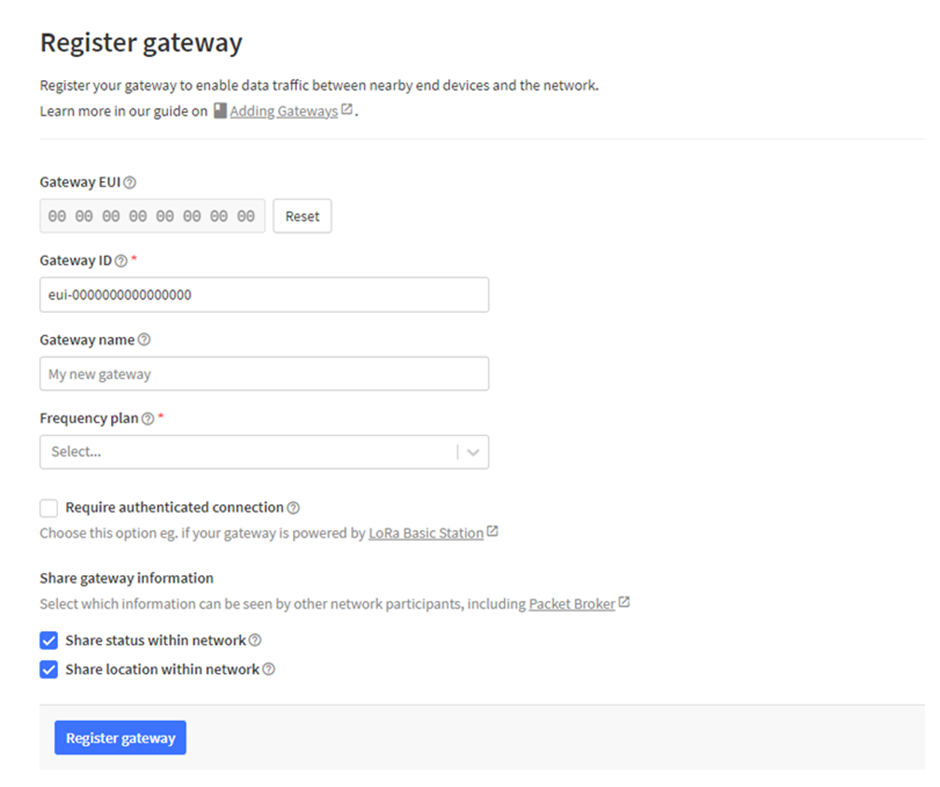
Remplissez Gateway EUI et cliquez sur Confirm. Certaines passerelles n’utilisent pas Gateway EUI (par exemple, la passerelle The Things Kickstarter), auquel cas vous pouvez simplement cliquer sur Continue without EUI.
Sur le formulaire d’enregistrement manuel, remplissez le Frequency Plan et Gateway ID s’il n’a pas été pré-rempli, les autres champs sont facultatifs. Cliquez sur Register Gateway pour terminer.
Votre passerelle sera créée et vous serez redirigé vers la page d’aperçu de votre passerelle nouvellement créée.
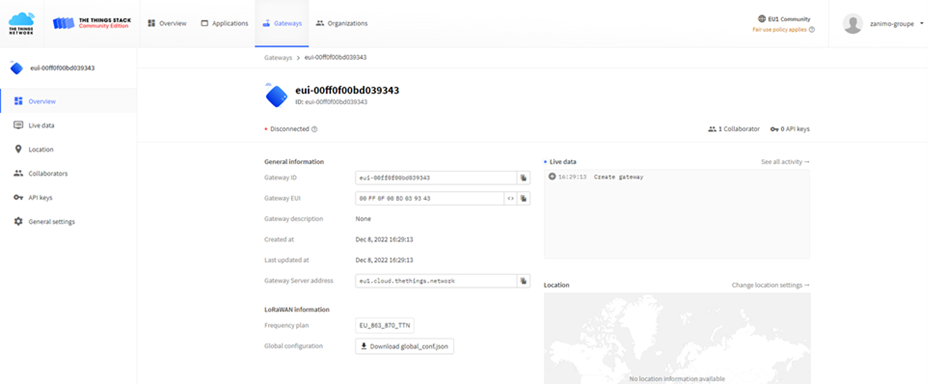
Maintenant vous avez juste besoin de fournir une alimentation 5V et une connexion réseau à la passerelle. La passerelle se connectera automatiquement au The Things Network.
b. Collier (end-device)
Pour configurer le collier, vous trouverez dans notre githlab, un dossier “get_data_and_send” contenant tous les éléments pour configurer cette fois le collier et récupérer les données (coordonnées) et les transmettre sur TTN.
Encore une fois, ce dossier contient trois fichiers principaux : main.py, config.py, pytrack_2.py et un dossier contenant la library, elle même divisée en trois fichiers détaillés plus bas.
Main (main.py)
Utilisé pour activer end-device automatiquement lorsqu’il est alimenté par une batterie.
Library
L76GNSS.py est le module GPS qui peut fournir des données de localisation à votre application. Vous trouverez plus de détails ici GPS (pycom.io)
LIS2HH12.py est un accéléromètre 3 axes qui fournit des sorties pour l’accélération, le roulis et le tangage. Vous trouverez plus de détails ici Accelerometer (pycom.io)
pycoproc2.py est une bibliothèque python de soutien pour les tableaux d’extension Pysense 2 et Pytrack 2. Vous trouverez plus de détails ici Pycoproc2 (pycom.io)
Pytrack_2.py
Ce fichier de code python a deux tâches. Tout d’abord, il va se connecter à la passerelle via OTAA. Lorsque la connexion est réussie, il utilise la bibliothèque L76GNSS pour obtenir les données de coordonnées et les transmettre à la passerelle en utilisant la connexion précédemment établie.
3. Boitier pour le collier
Pour que les composants puissent tenir sur l’animal, nous avons décidé d’imprimer un boîtier pouvant s’accrocher à n’importe quel collier ou harnais.
Les plans SDM sont disponibles sur notre githlab dans le dossier “boitier”. Vous trouverez nos premiers plans et une version améliorée.
4. Application
Comme le projet doit permettre de lier le collier avec son système GPS avec une application mobile, nous avons choisi de programmer notre application avec un framework facile et natif, permettant donc de programmer une seule fois pour les 2 plateformes que sont Android et IOS.
Ainsi, notre code est développé en orienté objet, facilement compréhensible et debuggable pour quiconque a les bases dans les langages utilisés.
Pour ce faire, nous avons développé l’application mobile avec le framework Flutter de Google (Lien vers la documentation de Flutter : https://docs.flutter.dev/).
C’est un Framework qui a aujourd’hui une communauté avec des millions de personnes, une documentation riche et facile permettant une prise en main facile et une grande quantité de tutoriel et de projets en open source réutilisable.
Enfin, une API a été développée afin de permettre la récupération des données depuis TTL. Cette API permet de faire le lien entre l’application et la base de données sur laquelle les coordonnées GPS sont.
L’API a été développée très facilement avec le langage Python et la librairie Flask. Pour un début, un fichier texte est utilisé comme base de données.
L’ensemble du code (Application mobile et Api) est présent sur le GitHub ici. L’API se trouve dans le répertoire zanimo/lib/api (https://github.com/Qamardine/zanimo/tree/main/lib/api).
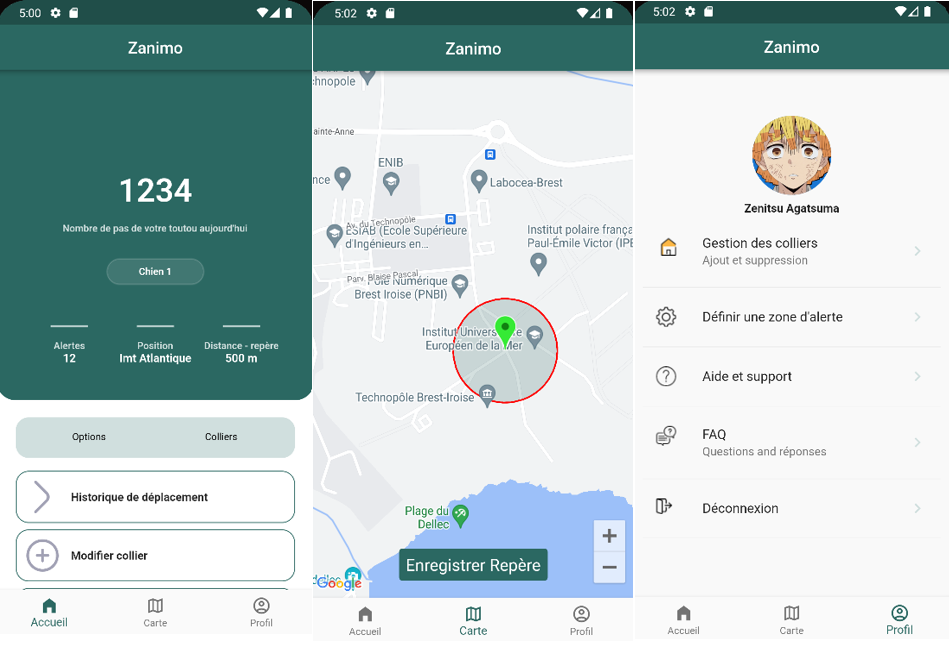
5. Interface mobile
Afin de permettre aux utilisateurs de voir l’itinéraire vers le chien, nous avons développé une application mobile qui reçoit les coordonnées GPS et à l’aide de l’API de Google Maps , affiche la position du choix sur la carte et l’itinéraire vers celui-ci.
L’application dispose aussi d’autres fonctionnalités qui n’ont pas pu toutes être terminées mais la fonctionnalité de base qui est celle de la localisation du chien et l’itinéraire jusqu’à lui a été totalement développée.
Pour l’intégration de l’API de Google Maps, il faut aller sur le site Google cloud (https://console.cloud.google.com/google/maps-apis) et créer une nouvelle clé API.
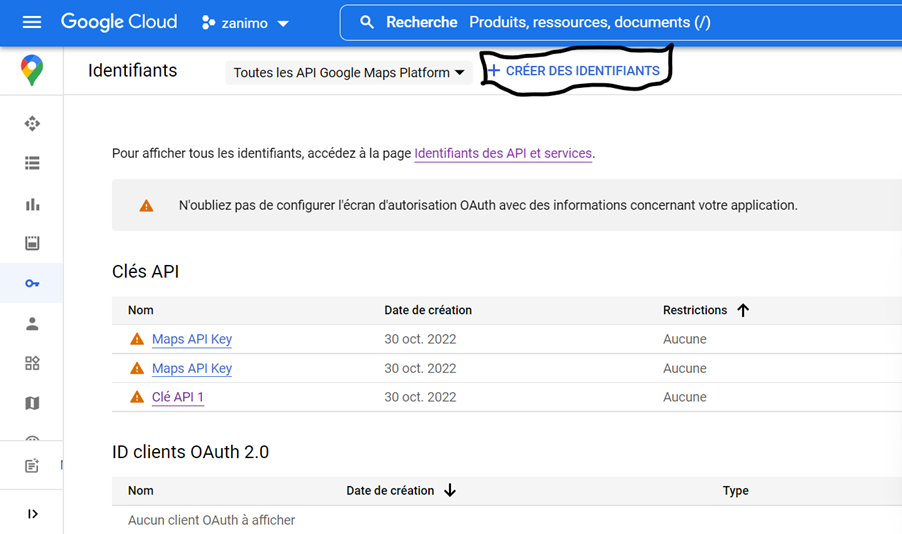
Cette clé API sera utilisée dans le code et permettra d’utiliser les services externes de Google.
Il faut ensuite activer tous les services qui seront utilisés par cette clé API. Dans notre cas, on aura besoin d’activer les services : Maps SDK for Android; Maps SDK for IOS et Directions API.
Les services API de Google sont payants. Mais pour une première utilisation, nous disposons d’une période de 3 mois d’essai gratuit.
Les interfaces d’inscription et de connexion de notre application ont été développées. Il ne reste que la partie du backend pour stocker ces informations dans une base de données.
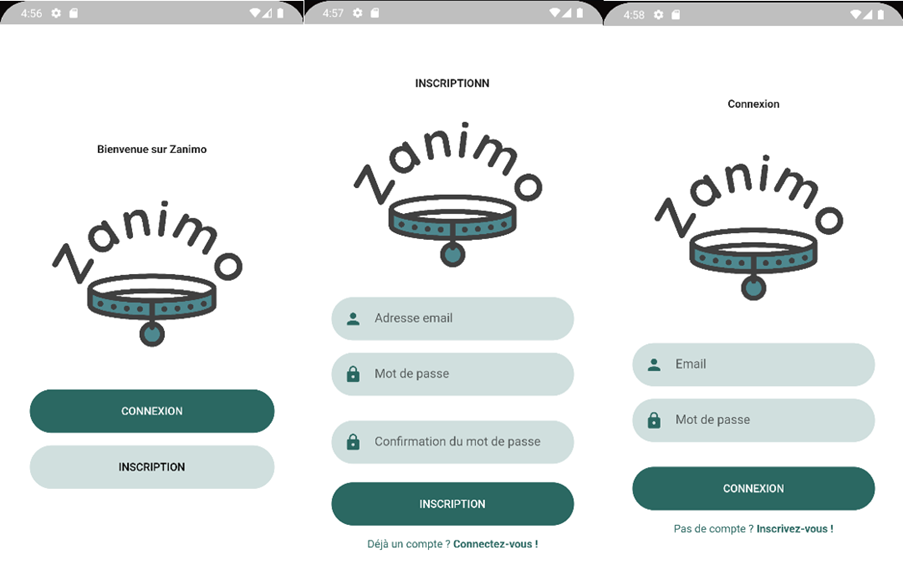
Le dashboard également a été développé. Il ne reste plus qu’à lier celà au backend qui permettra de mettre les informations dynamiquement.
La page permettant d’afficher la carte jusqu’au point du collier et de définir un point de référence ( le foyer du chien) est quant à elle terminée. Et enfin le front end de la page de réglage a été développé.
III. Résultats et perspectives d’amélioration
Voici premièrement une vidéo de démonstration de cette solution :
Perspectives :
- Position du téléphone comme référence pour l’itinéraire (plutôt que la position du foyer)
- Développer les options de la page d’accueil (alerte si en dehors de la zone/déterminer le rayon de la zone …)
- Développer le traçage d’une zone libre pour l’animal et le système d’alerte s’il la quitte
- Utilisation de composants plus performants pour renforcer l’instabilité du GPS
- Optimisation de la consommation d’énergie en développant un mode veille grâce à l’accéléromètre
- Optimisation de la taille du boitier, son étanchéité et son ouverture/fermeture, en se procurant des composants plus petits
Repair Café
Les Repair Café reprennent ! Tous les 1ers et 3ème jeudi de chaque mois (hors vacances scolaires), venez essayer de réparer vos objets, machines, vêtements défectueux de 13h30 à 16h au Téléfab.
Pour connaitre le thème de chaque Repair Café, inscrire votre matériel à réparer dans un commentaire et découvrir l’éventuel intervenant extérieur, rendez-vous sur le calendrier du Telefab !
En décembre, on se concentrera sur tous les meubles, jouets, objets utiles sans électronique à réparer. Le club couture tiendra également une table réparation textile : un grand merci !
Au plaisir de vous voir pour bricoler et s’entraider.
Une question, une proposition de thème, une envie de participer en tant qu’intervenant ? Un petit mail à maud.tournery[a]imt-atlantique.fr !
Zanimo – Enquête Terrain
Dans l’objectif de réaliser notre enquête terrain, nous avons rapidement déterminé les personnes que nous souhaitions interviewer pour notre projet. Nous avons donc appelé et envoyé des mails à différents établissements spécialisés pour les animaux comme des vétérinaires, des refuges ou encore des éducateurs d’animaux aux alentours. Nous présentions toujours le projet avant de proposer une rencontre.
Malheureusement, ce secteur étant très saturé, nous n’obtenons que très rarement des réponses favorables. Cependant, en persévérant, nous avons pu effectuer trois entretiens avec quatre personnes impactées différemment par l’enjeu des animaux :
Camille, bénévole dans un refuge
Valentin, éducateur canin
Thierry, propriétaire d’un chien fugueur
Corinne, propriétaire d’une chienne, équipée d’un collier GPS
C’est à travers la richesse de ces différents profils, ainsi qu’à une recherche documentaire, que nous avons pu identifier et valider les hypothèses suivantes :
- Les propriétaires d’animaux sont confrontés à la perte de leurs compagnons.
- Ces mêmes propriétaires sont inquiets pour leurs animaux et cherchent des solutions pour leur bien-être.
- Les solutions existantes ne répondent que partiellement à ce besoin.
Partie 1 – Synthèse de l’enquête terrain
Enquête 1 :
Camille, bénévole depuis 5 ans pour l’Arche de Noé au sein du bureau (décisionnaire de l’association), nous a accueilli et a accepté de répondre à nos questions et de nous faire découvrir cette association. Tous les chats adultes (95% des animaux du refuge) sont disposés directement dans les locaux (60 places) ou bien en famille d’accueil. Les chatons sont aussi tous en famille d’accueil. Des vétérinaires sur la ville de Brest sont partenaires et acceptent d’aider les bénévoles pour le soin des chats (vaccinations/stérilisation/problèmes de santé).
Partenariat avec la fourrière de Brest qui récupère les chats errants pour les donner à l’Arche de Noé, évitant ainsi l’euthanasie (fréquence : 2 arrivées par mois). Mais cela dépend de l’adoption de ces chats.
Quotidien des bénévoles (9h/12h) : nourrir, câliner, brosser, nettoyer leur environnement, désinfecter tout ce qui a été utilisé. Mercredi et samedi, permanence pour l’administratif. Tous les soirs, passage pour prodiguer les traitements indispensables (Bob chat diabétique nécessitant une piqûre).
Manque de bénévole : besoin de 6 personnes 7j/7 (majeurs)
Les chats peuvent montrer des signes de faiblesse pouvant être détectés uniquement par les bénévoles, connaissant leurs habitudes (petits signes). C’est pourquoi le suivi est très important. Un chat symptomatique est un chat malade depuis déjà pas mal de temps et assez gravement.
La propreté et l’hygiène sont un point très important dans ce refuge. Sur les 3h de permanences chaque matin, 1h30 est passées au nettoyage et à la désinfection de tous les objets utilisés. Avant de rentrer dans chaque pièce, il est nécessaire de nettoyer ses chaussures en marchant dans un bac contenant une serviette humide et un produit.
Enquête 2 :
Valentin, 20 ans, vient de terminer son BTS pour lancer sa propre activité : l’éducation des chiens. Cette passion lui est venue lors du premier confinement. Le chien familial de nature agressive posait problème à sa famille. Valentin a profité du temps confiné, pour s’instruire sur l’éducation et la rééducation canine et appliqué les méthodes vu sur son propre animal.
Aujourd’hui, après près de 100h de formation en ligne, Valentin peut enfin prétendre au poste d’éducateur canin. L’entretien s’est déroulé lors de la balade quotidienne de 2 chiens, dont Valentin s’occupe en ce moment, en l’absence de leurs maîtres. Valentin propose donc de l’éducation de chiots, de la rééducation de chiens et également du dog-sitting.
Il n’utilise que très peu de matériel, car selon lui, c’est mieux de pouvoir sans passer pour éviter d’en être dépendant. Il utilise donc uniquement 2 laisses courtes et deux laisses longues.
Commentaires :
Les laisses longues sont souvent trop longues et donc traînent derrière lui pouvant le déséquilibrer. S’occupant de deux chiens à la fois durant certaines de ses balades, il arrive très souvent que les laisses s’entremêlent. Pour rassurer les maîtres, il aime bien souvent faire des photos avec les chiens. Cependant, ce n’est pas très facile en tenant la laisse de deux chiens qui tirent.
Enquête 3 :
Thierry, cadre de 58 ans, vit dans une maison à la campagne disposant d’un jardin de 1000 m². Il y vit avec sa famille et leur chien : Gosby un Epagneul breton (race de chien de chasse) de 11 ans.
Le problème avec Gosby, c’est qu’il s’enfuit souvent. Soit il passe par le grillage quand il entrevoit des ouvertures, soit il se faufile dès que quelqu’un ouvre le portail ou le portillon sans faire attention. Ce problème est notamment dû au fait que Gosby est un chien diagnostiqué hyperactif et qu’il est d’une race de chasseur. De plus, Thierry assume ne pas promener assez souvent son chien, ce qui pourrait aider à résoudre son problème. Cependant, les ballades sont trop contraignantes et ne suffisent pas toujours car trop irrégulières.
Pour ses maîtres, ses fuites sont problématiques pour plusieurs raisons. Cela peut impacter sa sécurité et celle des autres (peut provoquer un accident) ; Cela procure une gêne affective et une certaine angoisse liée à sa sécurité (kidnapping) ; au regard de la législation, la famille peut être en tort ; auparavant, Gosby détériorait la clôture pour pouvoir passer.
Finalement le principal problème de ces fugues, c’est qu’il y a des risques.
Pour le moment, pour éviter de nouvelles fugues, la famille redouble de vigilance lors de l’ouverture des accès (portail et portillon). Cependant, c’est très contraignant et parfois restreint la liberté du chien pendant quelques minutes (obligé d’enfermer le chien dans la maison le temps de sortir/rentrer une voiture dans le jardin).
Les autres solutions existantes sont soit trop contraignantes pour eux et pour le chien, soit trop coûteuses. De plus, la famille manque de volonté.
Selon eux, il serait intéressant de pouvoir faire sortir Gosby pour qu’il se promène en toute sécurité, sans qu’eux n’aient à le faire.
Enquête 4 :
Corinne vit en appartement avec son mari et leur jeune Fox-Terrier de 2 ans. Étant une chienne de chasse, Corinne et son mari la promènent tous les jours pour qu’elle puisse sortir de l’appartement clos. C’est une chienne bien élevée, éduquée très tôt pour venir lorsqu’on l’appelle. C’est pourquoi les promenades se font majoritairement sans laisse. Seulement, étant une chienne de chasse, il se pourrait que son instinct de chasse prenne le dessus sur son éducation à la vue/l’odeur d’un gibier. De plus, de par son jeune âge, elle ne revient pas toujours lorsque Corinne ou son mari l’appelle.
Pour éviter de vivre ce genre de situation, le mari de Corinne lui a offert en mai dernier, un collier GPS d’une marque très connue pour ce genre de produit. Ce choix s’est fait très rapidement, puisque son mari a regardé sur internet les colliers GPS existants ayant le meilleur rapport qualité/prix selon les internautes et étant de petite taille et léger pour leur jeune chienne.
Ils ont donc trouvé un boîtier se fixant à un collier et fonctionnant grâce à un abonnement mensuel. Il est cependant nécessaire d’avoir un téléphone portable pour télécharger l’application liée au boîtier. Sur l’application, Corinne peut voir la position de sa chienne. Ce n’est pas totalement du temps réel, car la position se met à jour toutes les 30 secondes.
Dans l’ensemble, le couple est plutôt satisfait de cet achat. Elle remarque cependant quelques détails importants : cela dépend beaucoup du réseau et parfois, s’approchant des bases militaires de Brest (notamment sur le sentier côtier), les brouilleurs empêchent la transmission de données entre le boîtier et le téléphone. Même problème dû au fait que l’animal bouge et donc le boîtier à tendance à s’orienter vers le bas et donc de moins bien capté. Il serait intéressant de proposer un dispositif pouvant se fixer à un harnais pour que celui-ci soit toujours orienté vers le haut.
Aussi, le boîtier n’est pas waterproof, et pour des chiens aimant beaucoup la boue et les rivières, l’appareil ne convient absolument pas.
Enfin, l’attache au collier se fait avec des petits bouts de caoutchouc qui ne semblent pas très solides. En cas de casse, le boîtier entier doit être échangé/racheté.
Partie 2 – Persona


Recherche documentaire sur la simulation en santé à Brest
Auteurs : M. Déturche, H. Zaouly, L. Genin
Le centre de simulation CESIM-Santé de Brest : Le centre de simulation est réparti entre quatre salles de simulation complexe et de debriefing. Un local technique est équipé de toute la régie, l’informatique (système d’enregistrement/reproduction audio-vidéo numérique haute définition). De grands écrans permettent de diffuser à l’équipe médicale des images de radios par exemple pour améliorer encore le réalisme .
Les salles de simulation peuvent être arrangées en fonction des scénarios, et équipées avec du matériel et ameublement hospitalier pour blocs opératoires, blocs d’accouchement, salles d’auscultation, salles d’accueil d’urgences vitales. L’environnement «mère-enfant» est recréé également par des tables chauffantes pour nouveau-nés.
Année de création : 2009, 5540 stagiaires-jours par an, 365 formations par an.

Schéma du centre :
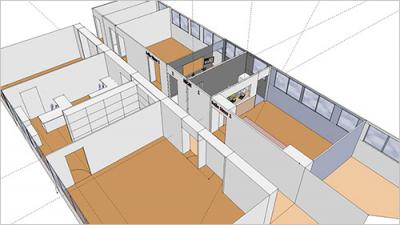
- Trois salles de simulations
- Trois régies automatisées
- Trois salles de cours/debriefing
- Un accueil/secrétariat
- Un cabinet de consultation
- Un appartement de simulation
- Une salle de gestuelle
- Un bloc expérimental
- Une plateforme de simulation maritime
- Deux salles de stockage
Une visite virtuelle du CESIM existe pour mieux comprendre l’agencement d’une salle: [1]
Personnes concernées par la qualité de la simulation : Les techniciens du CESIM (2 personnes), les formateurs et les étudiants qui suivent les formations par la simulation (étudiants en santé notamment internes en anesthésie-réanimation et médecine d’urgence).
Observation faite sur la communication du technicien depuis la régis avec la salle de simulation dans laquelle se trouve l’étudiant: Lors d’une simulation, quand le technicien souhaite que l’étudiant reçoive une donnée concernant le faux patient, il doit actuellement lui transmettre l’information manuellement. Il parle alors dans un micro depuis la salle de régie pour que l’information soit diffusé via une enceinte dans la salle de simulation. La salle de simulation mime l’aspect, les sons et parfois l’odeur de salles d’opérations ou d’intérieurs d’ambulance. La prise de parole par l’opérateur interrompt donc l’immersion de l’étudiant que l’opérateur cherche avant tout à créer.
Notre groupe a pour particularité d’avoir conscience d’une problématique du CESIM avant d’avoir commencé la recherche documentaire, par conséquent nous étudions directement les appareils concernés par cette problématique.
Définitions de termes employés au CESIM dans les simulations qui comprennent des données médicales:
Le taux de glycémie est la concentration de sucre dans le sang. Il se mesure avec un appareil à glycémie que l’on appelle “hémoglucotest” ou “Dextro” (surnom donné à cause d’une marque qui s’appelle Dextro).
Le taux d’hémoglobine capillaire est la concentration d’hémoglobine (protéine fixatrice du fer et donc de l’oxygène) présente dans les petits vaisseaux notamment présents à l’extrémité des doigts. Le taux d’hémoglobine capillaire se mesure avec un hémoglobinomètre, aussi appelée « hémocue » ou « hémoQ » (surnom donné à cause d’une marque qui s’appelle comme ça, mais qui ne doit pas être évoqué sur notre solution puisque c’est un nom déposé, comme Dextro).
La recherche documentaire a été réalisée en parcourant internet.
Technique actuellement employée par le CESIM pour la télécommunication: Entrée: Micro en régis / Sortie: enceinte en salle de simulation.
Produits commercialisés qui servent à mimer des appareils de mesure lors de simulations en Santé: Nous avons fait des recherches sur les produits qui peuvent être utilisés en centre de simulation et qui ont un rapport avec la prise de température, de taux d’hémoglobine ou de taux de glycémie. Pour cela, nous avons orienté nos recherches en consultant les sites des partenaires du CESIM-Santé, parmi lesquels figurent de grands groupes comme GE Healthcare ou Sanofi. Ce sont les suivants :
- sensoryco4D, GE Healthcare, cervva, adis, sanofi, hamilton medical, smith medical, simAfor, smithsmedical, ResMed, Medi calem, Laerdal, maqpro, multicam, Gaumard, Novartis, Virtualys, Fisher et Paykel HEALTHCARE, twin, id2 Santé, weinmann.
La simulation en Santé est un domaine dans lequel il y a assez peu de ventes car il n’existe que 70 centres de simulation en Santé en France répertoriés sur le site de la société française de simulation en santé [2] et que chaque centre n’a pas besoin d’acheter le même produit de nombreuses fois. Cela a pour conséquence que le système des entreprises traditionnel propose des produits à coût élevé de manière générale en simulation en Santé. La lecture des sites montre que la plupart des stations de simulation dépassent le millier d’euros et les mannequins réalistes vont jusqu’à plusieurs centaines de milliers d’euros.
Voici ce que l’on a observé pour chaque appareil dont les fonctions sont mimées par le CESIM-Santé:
THERMOMÈTRE: Un produit existe mais il est très cher (5000 euros), ne permet d’envoyer qu’un seul type de donnée sur un faux thermomètre (ne répond donc pas aux demandes d’appareil à glycémie et hémoglobine) et le design de l’appareil est fait de manière à ressembler au thermomètre le plus utilisé en Amérique du Nord, et a par conséquent un design qui ne rappelle pas l’apparence des thermomètres utilisés en France [3]. Voici, ci-dessous, une image du genre de thermomètre que l’on retrouve à Brest dans les hôpitaux :

GLYCÉMIE: Il existe un produit fait par Adam Rouilly et vendu sur le site Medicalem dont le lien de la page de présentation est le suivant: [4]. Il s’agit d’un appareil qui ponctionne une fausse main pour mesurer un taux de sucre. Ce système fonctionne grâce à un liquide mis à l’intérieur et qui doit être réapprovisionné ce qui augmente encore le coût du système d’Adam Rouilly. De plus son système ne permet pas de déterminer une valeur aussi librement que si on le fait numériquement. De plus, la valeur ne peut pas être modifiée pendant la simulation. Point intéressant: le design des boutons peut nous inspirer pour notre système.
Voici, ci-dessous, un exemple de véritable appareil à glycémie, tel qu’on le retrouve au CHU de Brest:

HEMOCUE: Nous n’avons pas trouvé d’appareil de simulation sur le site officiel de “hémocueFrance”. De même sur les autres sites parcourus (voir ci-dessus). Voici un exemple du véritable appareil, que l’on retrouve au CHU de Brest (voir ci-dessous) [5]:

APPLICATION SUR UN TÉLÉPHONE: en tapant le mot “iSimulate” dans l’apple store, il est possible de trouver une application iOS qui affiche 3 types d’appareil sur un téléphone. Cependant, cela ne fait qu’afficher un dessin d’appareil à l’écran, mais cela ne permet pas de communication avec un logiciel en salle de régie et il n’est pas possible de faire varier la valeur sur le dessin. Voici, ci-dessous, une image de l’application iSimulate:[6]
Autrement, nous n’avons pas trouvé d’application plus intéressante.

Information qui montre l’utilité d’équipements de simulation moins chers et de qualité pour l’étudiant : Certains internes en anesthésie-réanimation ont une journée par semaine consacrée à la formation en simulation, bien que celle-ci soit facultative dans leur cursus. La simulation est donc une part importante de leur formation. De plus, de nombreux organismes semblables au CESIM existent aussi à l’étranger et proposent aux étudiants en médecine de par le monde de se former grâce à des simulations comme le CMS (Centere for Medical Simulation) ou Jhon Hopkins Medicine. De plus, certains pays défavorisés en Afrique ou en Asie n’ont pas le budget suffisant pour s’équiper du couteux matériel moderne fourni par les grandes multinationales et notre solution permettrait de former plus de médecins efficacement dans des pays qui en ont besoin.
Remarque finale sur la recherche documentaire: Il n’existe pas d’appareil à la fois neutre, ressemblant à un appareil de mesure médical et qui puisse recevoir de la régie et afficher tous les types d’information nécessaires aux scénarios de simulation du CESIM-Santé (température, taux de glycémie et taux d’hémoglobine).
Un téléphone peut remplir ces fonctions mais ne ressemble pas assez aux appareils de mesure qui ont plutôt l’aspect suivant: un écran qui occupe moins de la moitié de la face antérieure de l’appareil, un affichage épuré, peu de boutons, une coque en plastique.
Bibliographie:
[1] Visite virtuelle du CESIM: https://youtu.be/VIf7oeGYrko
[2] Evaluation des structures de simulation – SoFraSimS : https://sofrasims.org/sofrasims/comites/evaluation/evaluation-des-structures-de-simulation/
[3] Thermometer Plus simulator: https://innov2learn.ca/devices/thermometer-plus/
[4]AR28 Simulateur de glucomètre numérique (medicalem.com): https://www.medicalem.com/produit/ar28-simulateur-de-glucometre-numerique
[5] Lien vers les caractéristiques de l’Hémocue: https://www.michiels.be/fr/hemocue/2669-HEMOCUE.html
[6] Lien vers le site web de l’application iSimulate: https://www.isimulate.com/fr/pockit
OBO: Étude Terrain et Personas
Group 1: Andrés Ricardo CÉSPEDES GARCÍA, Fabrice KOUAME, Daniel Alejandro TERÁN FERNÁNDEZ,
Dans notre projet, nous avons décidé de nous concentrer sur les transports en commun. Suite à notre état de l’art, il a été nécessaire de réaliser des enquêtes de terrain afin de confirmer ou de corriger nos hypothèses initiales. Le tableau suivant résume les enquêtes réalisées :
| Personnes rencontrées | Métier | Date de rencontre |
| M. Tram | Conducteur de bus et de tramway | 19/09/2022 |
| Mme et M. Voyage | Usagers des transports en commun | 19/09/2022 |
| M. Téléphérique | Usager des transports en commun | 19/09/2022 |
| Mme. Entreprise | Employée chez RATP | 27/09/2022 |
Partie 1 – Synthèse de l’enquête terrain
Entretien avec M. Tram : Un chauffeur de bus et de tramway
Nous avons décidé d’interviewer une personne qui était directement liée aux transports en commun, alors la conversation avec ce professionnel de la conduite est très vite devenue naturelle d’autant plus qu’il était à la fois conducteur de bus et de tramways chez le fournisseur Bibus.
L’interviewé est un conducteur de tram et de bus avec de nombreuses années d’expérience, bientôt à la retraite, qui nous a raconté avec détails les aléas de son métier.
Pour le conducteur, il devient clair que les transports en commun sont très importants car ils transportent des centaines de personnes chaque jour. Il estime qu’un niveau d’attention plus élevé est nécessaire dans le tram que dans le bus car les conditions sur les rails sont différentes de ce qu’on peut avoir sur les toutes normales.
Le chauffeur nous a confié que l’attroupement de personnes dans certaines parties des transports en commun est un réel problème. Fort de son expérience, il s’est rendu compte que les personnes âgées ont tendance à s’asseoir à l’avant du véhicule, près du chauffeur ; tandis que les plus jeunes ont tendance à préférer les zones arrière.
- Tram s’estime chanceux car durant ses années de service, il n’a jamais été témoin d’agressions ou de harcèlement. Cependant, il est conscient qu’il s’agit de problèmes existants.
Il nous a dit que parfois les gens ont tendance à s’entasser à la porte d’entrée du bus, alors la solution qu’il a adoptée est de prendre un moment pour demander verbalement aux passagers de se déplacer à l’arrière du bus. Il nous a également indiqué que cette solution ne peut pas être adoptée dans le tram car il est isolé dans sa cabine pendant qu’il travaille.
Entretien avec Mme et M. Voyage : Usagers des transports en commun
En se promenant dans la ville, nous avons rencontré un couple qui visitait la ville de Brest, qui a très gentiment accepté de nous raconter son expérience en tant qu’usager des transports en commun.
Le couple a déclaré qu’il venait d’une grande ville, dans laquelle prendre les transports en commun est chaotique et stressant. Ils nous ont dit qu’il était fréquent d’accuser du retard dû à la saturation du système de transport.
Mme et M. Voyage nous ont indiqué qu’ils n’utilisaient pas habituellement les transports en commun, mais en plus des problèmes mentionnés ci-dessus, ils ont justifié leur choix par des raisons environnementales. Ils nous ont dit qu’ils préféraient marcher jusqu’à leur destination ou y aller à vélo.
Entretien avec M. Téléphérique : Usager des transports en commun
Monsieur Téléphérique a accepté l’interview et nous a fait part de son point de vue concernant les transports en commun.
L’interviewé a déclaré qu’il utilisait fréquemment les transports en commun. Il nous a fait savoir qu’au moment de décider quel moyen de transport utiliser pour se déplacer, il prend en compte : la sécurité, le confort, le temps de trajet et le prix.
L’homme nous a dit qu’ayant le besoin de se déplacer lorsqu’il y a une affluence très importante, il se sent mal à l’aise car il considère qu’il est plus facile d’être victime de pickpockets.
Monsieur Téléphérique n’a jamais été victime de harcèlement, cependant il considère que dans les transports en commun c’est un problème latent qui peut survenir à tout moment.
Entretien avec Mme. Entreprise : Employée chez RATP
Cet interviewé est le responsable du laboratoire d’innovation à RATP.
Lors d’un entretien avec Madame entreprise, elle nous a dit qu’il existe aujourd’hui différentes méthodes pour recevoir des suggestions et des commentaires d’utilisateurs, comme les e-mails, les bureaux et les appels téléphoniques.
Elle nous a dit qu’aujourd’hui une solution au problème de l’encombrement dans les transports en commun est d’affecter des travailleurs avec des gilets orange qui ont des informations à jour et, en plus de recommander une distribution différente, sont capables de fournir des informations sur les itinéraires du système.
La personne interrogée a indiqué qu’un nouveau format de suggestion est en cours de test, dans lequel certains utilisateurs peuvent participer à des ateliers où ils peuvent présenter leurs idées pour résoudre les problèmes actuels du système de transport public.
Madame Entreprise nous a fait savoir qu’un problème auquel elle fait face aujourd’hui est la transmission des informations de changement d’itinéraire aux usagers en cas d’interruptions de service dues aux manifestations.
La dame nous a dit qu’elle trouve très intéressante la possibilité de répartir les gens de façon plus équitable dans le système et croit qu’ainsi, la qualité du service s’en trouvera améliorée. Elle est ouverte à la possibilité de tester des solutions présentées par le public.
Conclusions
Après avoir mené les 4 entretiens, il est devenu évident que chaque personne a des besoins différents. Cependant, il y a quelques points communs que nous considérons comme importants :
Tout d’abord, il est important de souligner l’accumulation de passagers dans certaines zones des transports publics (comme les portes), laissant d’autres complètement vides.
Deuxièmement, nous avons constaté que les gens trouvent qu’il est extrêmement important de prendre en compte le confort, la ponctualité, la sécurité et le prix lorsqu’ils décident du moyen de transport à utiliser.
De même, les personnes interrogées ont exprimé leur intérêt pour une solution au problème de l’encombrement dans les transports en commun.
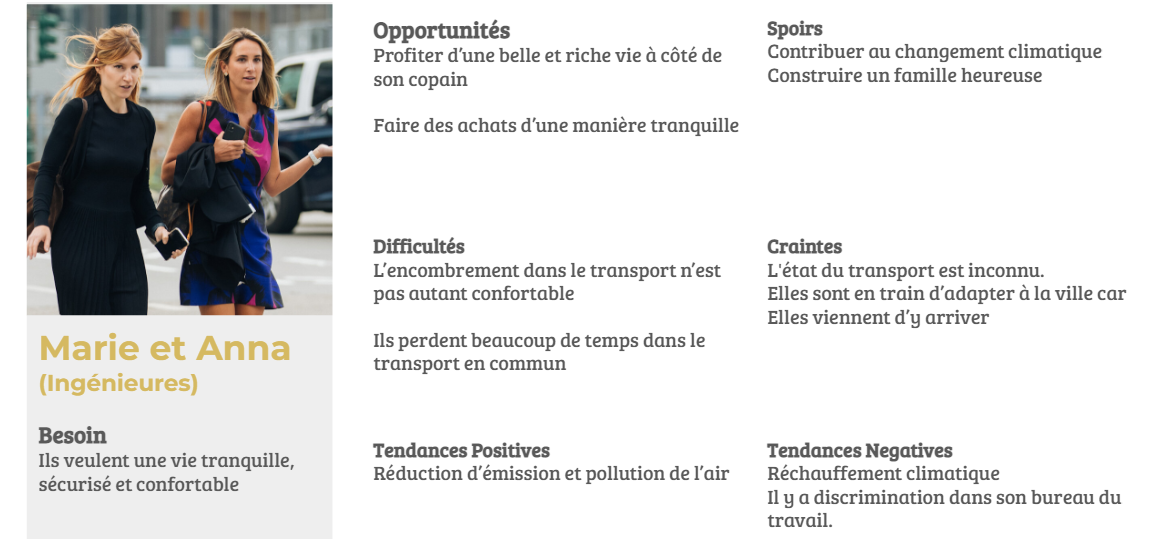
Personas
Nous avons fait trois PERSONAS qui ont des espoirs et besoins différents où nous collectons les plus importantes différences et caractéristiques des personnes affectés par OBO.
Marie et Anna sont principalement des professionnelles qui accordent une importance particulière au confort et à la tranquillité lorsqu’elles décident d’utiliser les transports en commun. Aussi, en tant qu’ingénieurs, leur travail leur permet de travailler sur des projets liés au thème de l’environnement et de la construction d’une société durable. Par rapport aux transports en commun, leur problème vient du fait qu’elles ne connaissent pas assez le fonctionnement du système pour pouvoir faire un choix optimal lorsqu’il y a des congestions. On a choisi ces profils pour représenter des personnes qui priorisent le confort à la rapidité et qui sont pour des moyens de transport durables et respectueux de l’environnement.
Maurice est un travailleur acharné avec un travail qui exige la ponctualité et des déplacements rapides. Ses options de mobilité peuvent être variées. A cause d’une possible crise de chômage dans sa ville, il doit donner le meilleur de lui-même pour ne pas être parmi ceux qui pourraient être touchés par cette crise et cela passe aussi par son assiduité et sa ponctualité au travail. En ce qui concerne les transports en commun, il priorise donc la rapidité afin d’arriver à l’heure au travail, toutefois il ne néglige pas le volet confort. Son profil représente les personnes qui priorisent le transport rapide et qui connaissent d’autres moyens de transport qui offrent plus d’avantages que les transports en commun.

Denise représente des femmes enceintes qui ont des besoins particuliers auxquels le système de transport doit répondre. Son profil nous donne des caractéristiques sur la priorité exceptionnelle du confort pour son bien-être. Aussi, il y a le problème de harcèlement dans les espaces publiques qui peut être accentué par l’encombrement dans les transports en commun.

Recherche documentaire sur la TRACABILITE DES VETEMENTS DANS L’INDUSTRIE DU TEXTILE
Auteurs :
| Moya APIA |
| Hoang DUONG |
| Tanguy de LANVERSIN |
MOTS CLESTraçabilité Recyclage |
 |
1. Quel est le problème ?
Remonter une filière jusqu’au producteur de matières premières est devenu mission presque impossible dans l’industrie du textile. De sous-traitants en sous-traitants, la confection de nos vêtements emprunte bien trop souvent des filières opaques et destructrices tant d’un point de vue sanitaire qu’environnemental. Aussi, avec le fléau de la contrefaçon, nombre de vêtements présents sur le marché de consommation sont à forte constitution chimique, remettant ainsi en cause la sécurité sanitaire des consommateurs. Face à cela, les consommateurs deviennent de plus en plus regardants sur l’origine et les conditions de fabrication de leurs vêtements, développant ainsi des méfiances à l’égard de certaines marques. Près de 2 Français sur 3 (65%) affirment aujourd’hui que l’engagement des marques et des entreprises en matière de développement durable constitue un critère de choix important au moment de leurs achats mode /habillement”, selon une enquête IPSOS publiée en 2019 [1].

À ce jour, la traçabilité des vêtements présente un enjeu majeur tant pour les consommateurs soucieux de leur bien-être, que pour les marques désireuses de maintenir un climat de confiance avec leur clientèle. Pour rassurer les consommateurs quant à la fiabilité des produits, les marques telles que H&M utilisent l’outil de traçabilité Textile Genesis [2] et bien d’autres dont nous parlerons dans la suite. |
H &M (TEXTILE GENIS)– By Amit Gautam, Founder & CEO, TextileGenesis, Avril 2022 Le groupe H&M est à la pointe de la traçabilité dans l’industrie de la mode et nous a continuellement mis au défi de fournir une traçabilité à grande échelle. Notre ambition commune de suivre plusieurs centaines de millions d’unités, de la fibre à la vente au détail, marque une étape importante. Elle permet à l’ensemble du secteur de progresser dans la réalisation d’une traçabilité évolutive de la chaîne d’approvisionnement. |
2. Recherche documentaire
Face au problème de traçabilité des vêtements, de nombreuses techniques sont utilisés par les acteurs de l’industrie du textile, en particulier les marques de vêtements afin de répondre à ce besoin. Nous en présenterons quelques-unes dans cette partie.
  |
PRODUCTION DE VÊTEMENTSPlusieurs techniques existent aujourd’hui pour répondre à ce besoin. Certaines marques choisissent de produire elles-mêmes leurs vêtements à partir de matériaux soigneusement sélectionnés par des experts, c’est le cas de la marque mARIANNE by Marie Jordane, une marque française de prêt à porter écoresponsable pour femme, qui privilégie les matériaux en coton. Cette méthode, bien que très pratique, ne garantit pas aux consommateurs l’authenticité des produits utilisés. En plus de cela, elle génère des coûts supplémentaires de production. [3] |
ETIQUETTE TRADITIONNELLEÀ côté de cela, nous avons aussi l’étiquette traditionnelle, qui s’est modernisée au fil des années, avec l’essor des technologies de la 3e révolution. En effet, le monde des vêtements est passé des étiquettes habituelles, souvent écrites en 10 langues, donnant uniquement le lieu de fabrication des vêtements, à un nouveau modèle qui fournit aussi la composition des habits, grâce à l’ajout de code QR sur l’étiquette [4]. Cette innovation connaît cependant une limite au niveau de la durabilité des codes QR et de la surface d’impression. Dans certains cas, les codes sont imprimés sur un papier spécifique qui sera probablement retiré après l’achat. Dans les cas où l’impression est faite directement sur le vêtement, le code risque d’être illisible au bout de quelques lavages. |
BLOCKCHAINLa blockchain est une autre solution au problème de traçabilité des vêtements. Une application de cette technologie, réalisée par l’entreprise Tilkal, consiste à faire intégrer par le fabricant les informations concernant les vêtements dans un logiciel que l’utilisateur pourra récupérer via le scanne d’un code-barres. L’utilisation de cet outil est bien souvent difficile, car les informations proviennent de plusieurs sources. |
 |
BIOMARQUEURProvenant de légumes ou fabriqués de façon artificielle, cette technique a été mise en place par Michela Puddu, directrice générale de Haelixa. Elle consiste à intégrer des biomarqueurs sur les tissus dès leur conception. En effet, un biomarqueur enfermé dans une nanosphères de 1/10.000 mm de diamètre est pulvérisé sur le tissu dès la sortie de la fabrication jusqu’aux revendeurs. Ainsi, ces biomarqueurs constituent un ADN artificiel qu’il est possible de lire pour retracer les vêtements. |
Biomarqueur : Caractéristique biologique mesurable liée à un processus normal ou non et utilisé dans le domaine de la médecine. lien vers la vidéo de Haelixa : Haelixa-Our values
3. Discussion du problème initial
Notre intérêt initial était sur la seconde vie des vêtements, en particulier sur le fait que les vêtements sans étiquettes ne peuvent pas être recyclés (utilisés pour faire d’autres matériaux). En effet, les étiquettes des vêtements nous informent sur les origines et la composition des vêtements, bien que ces informations soient insuffisantes, il est impossible de savoir comment transformer les vêtements sans celles-ci.
| La transformation des vêtements ne constitue pas un problème majeur car peu de vêtements sont transformés en matériaux dans la seconde vie, la plupart sont revendus ou offerts. En effet, sur 210.000 tonnes de produits usagés collectés chaque année en France, 59,4% est retourné dans les boutiques, 31,8% est transformé en chiffons… et seulement 7.5% est transformé en combustible solide et matériaux [5]. | Au vu de ces chiffres, il est flagrant que la seconde vie d’un vêtement est, dans la majorité des cas, la remise de celui-ci sur le marché de consommation. Aujourd’hui de plus en plus de personnes s’intéressent à l’origine des vêtements qu’ils achètent. Vu l’importance des origines de vêtements, nous avons décidé de nous réorienter sur la question de la traçabilité des vêtements. |
||
4. Premières hypothèses
Face au problème de la traçabilité des vêtements, nous avons formulé certaines hypothèses dans le bus comprendre les causes fondamentales du problème et évaluer les pistes de solutions. Nos hypothèses sont les suivantes :
- Plusieurs acteurs sont liés à la composition des vêtements, ce qui cause le manque de traçabilité.
- Révéler toutes les informations sur les vêtements peut compromettre les marques et les usines de fabrication.
- L’utilisation de plusieurs types de matériaux différents lors de la fabrication des vêtements, peut rendre difficile le fait de les mettre à disposition.
- Les informations sur les vêtements peuvent être incompréhensibles pour les consommateurs, à cause des termes techniques et scientifique, qu’on ne peut pas remplacer.
- Les solutions de traçabilité existante ne sont pas durables, elle ne permettre qu’une traçabilité partielle des vêtements.
- Les étiquettes sont difficiles à lire et à comprendre à cause de la taille de la police (souvent très petite).
- Peu de domaine cherche à trouver des solutions, dans le domaine des vêtements.
- Les solutions de traçabilités génèrent des coûts supplémentaires.
- Pour un consommateur, connaitre la traçabilité des vêtements, n’est important que lors de l’achat.
- Une bonne solution de traçabilité doit pouvoir se passer de l’intervention des marques et usines de production.
- La technologie constitue une meilleure approche, pour répondre à cette question.
5. Mot de fin
En tant que des acteurs, du monde technologique, nous souhaitons mettre en avant la puissance des outils de la troisième révolution industrielle, en vue de répondre efficacement à la question de la traçabilité des vêtements. Ainsi, nous voulons tirer profit d’une technologie existante, la RFID, pour garantir une traçabilité la plus fine et précise possible. Les étiquettes RFID ont déjà été adoptées par de nombreuses marques (Décathlon et Wallmart..), leur permettant d’améliorer au quotidien la gestion des stocks et de réduire considérablement le nombre de vols dans leurs magasins. Nous voulons étendre ces cas d’usage à une garantie d’authenticité pour le consommateur et à une possibilité de remonter toute la filière de production du vêtement acheté. Aussi permettre aux marques et acteurs de l’industrie du textile de rassurer leur clientèle sur la provenance des produits.
La recherche documentaire et les entretiens que nous avons réalisés ont révélé de manière indiscutable l’enjeu que représente la traçabilité des vêtements. Mais il est aussi ressorti que cette thématique est très vaste, et de ce fait assez complexe à traiter. Au vu de cela, nous avons réorienté notre étude sur une autre problématique, à savoir : Comment automatiser la gestion des stocks de vêtements au sein d’un magasin ? Cette interrogation qui est désormais l’objet de notre travail, est d’une grande importante pour les surfaces de vente de vêtement, d’autant que la plupart ont recours à des méthodes peu pratiques. En effet, dans certains magasins comme décathlon, les employés doivent scanner manuellement les étiquettes des vêtements afin de les enregistrer. C’est donc dans le but d’améliorer ce processus que nous portons notre intérêt sur la gestion des stocks en magasin.
 |
Références bibliographiques :
[1] Faustine Ducreu & Doan-Anh Pham, «les français et la mode durable», IPSOS, 1 оctobre 2019 : consulté l’article
[2] Merel Krebbers & Amit Gautam «H&M Group expands partnership with TextileGenesis», H&M Group, 29 Avril, 2022 : consulté l’article
[3] Marie Jordane, «mARIANNE by Marie Jordane », Marques de France : consulté l’article
[4] «L’étiquette de traçabilité pour le textile, à quoi sert-elle ?», Footbridge : consulté l’article
[5] Nicole Buyse, «Fripes, chiffons, combustibles : ce que deviennent les textiles», Les Echos, 23 juin 2017 : consulté l’article
Enquête terrain sur la télécommunication entre les enseignants et les étudiants en simulation au CESIM-Santé de Brest
Auteurs: Maxime DETURCHE, Héliote ZAOULY, Lucas GENIN
Le groupe « Santé! » de la TAF CoOC à IMT atlantique, a réalisé une enquête terrain, en deux rendez-vous, auprès du personnel du CESIM-Santé de Brest et de deux jeunes médecins.
Lors de la première partie de l’enquête terrain, le groupe santé! de la TAF CoOC, en septembre 2022, a rencontré un technicien, membre du CESIM-Santé de Brest, centre de simulations en santé pour l’entraînement d’étudiants en Santé à la faculté de Brest. Son problème est qu’il souhaite transmettre, à l’étudiant en salle de simulation, depuis une salle de régis, des informations de température, de taux d’hémoglobine et de taux de glycémie lors d’environ 60% des entraînements et qu’actuellement lui et sa collègue technicienne ne peuvent le faire qu’en parlant dans un micro, ce qui interrompt l’immersion.
Face à cette problématique, le groupe « Santé! » de la TAF CoOC se lance dans un projet de développement d’un système composé d’un appareil électronique, entouré d’une coque, mis dans la main de l’étudiant en simulation, qui communique avec une application Web sur l’ordinateur de l’opérateur et qui en reçoit des données qu’il affiche. L’appareil est constitué d’un circuit électronique et d’une coque de manière à imiter les appareils de mesure suivants:
- thermomètre
- appareil à glycémie
- appareil à hémoglobine.
Déroulement du deuxième entretien de notre enquête terrain:
Nous avons interrogé 5 personas concernées par cette problématique:
- Au centre du CESIM-Santé, les deux techniciens du CESIM et un formateur du CESIM, pompier, qui a suivi une formation pour devenir formateur
- Dans le hall de la faculté de médecine de Brest: deux jeunes médecins récemment étudiants, diplômés le jour même de notre interview.
La particularité de notre méthode de gestion de projet a été de fusionner la seconde enquête terrain avec une première démonstration de prototype.
L’entretien s’est fait par un échange sous forme de questions et de réponses et d’une écoute des remarques que les interviewés voulaient faire.
Synthèse de la deuxième enquête terrain
Rapport de l’interview d’Albert et Sophie, deux techniciens du CESIM-Santé et de Jacques, pompier formateur

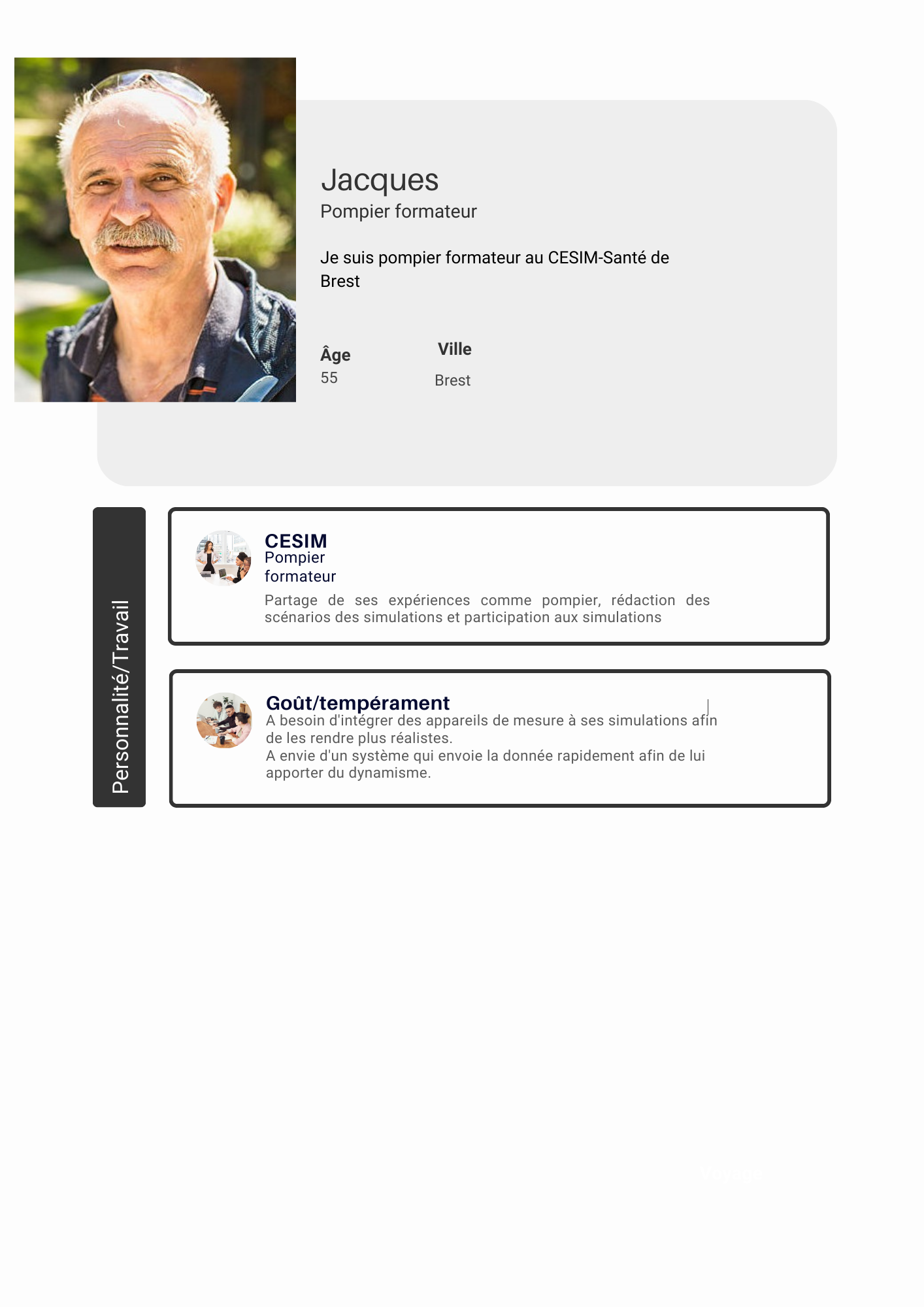
Au cours de l’enquête, les techniciens nous ont expliqué l’organisation des simulations: Lors de chaque simulation, il y a toujours un technicien et un formateur dans la salle de régis. Le formateur est un médecin, dentiste, pompier ou intervenant en communication qui a reçu une formation pour pouvoir organiser des simulations. Les formateurs ont reçu une formation pour organiser les formations. Ils écrivent les scénarios en fonction de situations vécues dans leur vie et de manière à suivre les programmes de formation (la simulation n’est pas obligatoire au niveau national et une ville comme Marseille ne propose aucune simulation à leurs étudiants). Les techniciens, au nombre de deux au CESIM, sont responsables du fonctionnement des appareils utilisés lors de la simulation.
Les deux techniciens travaillent plutôt sur leur pôles préférés mais il leur arrive de travailler chacun dans chaque pôle: anesthésie, chirurgie, médecine de réanimation, pédiatrie, par exemple.
Selon eux, pour notre système, une seule coque multi-usage serait préférable et elle répondrait à leurs critères. Le gris serait, d’après Pierre, le technicien, une bonne couleur pour la coque.
Ils nous ont rappelé que l’appareil serait utilisé de manière quotidienne avec 4 à 6 simulations organisées par jour du lundi au vendredi.
Ils aimeraient avoir une adresse IP fixe, de manière à faciliter leur configuration.
Rapport de l’échange avec les deux jeunes médecins de deux spécialités différentes

Nous avons interrogé deux médecins l’un après l’autre, Baptiste puis Louise.
Louise, médecin généraliste, trouve que la coque pourrait être deux fois moins longue.
Baptiste, médecin anesthésiste, trouve que les détails décoratifs ne sont pas importants et qu’il est préférable d’avoir une coque épurée. La coque multi-outils lui conviendrait mieux que d’avoir une coque pour chaque appareil puisque selon lui, chaque appareil peut avoir un design variable. Il trouve qu’une couleur plutôt neutre comme du blanc serait appréciable.
Les conclusions que nous en tirons:
- Il faut faire un seul système électronique recouvert d’une coque multifonctions.
- Il faut utiliser une batterie capable de tenir plus d’un jour
- Il faut munir l’appareil d’un bouton afin que l’extinction et l’allumage fréquents de l’appareil n’endommagent pas le circuit.
- Il faut faire la coque de manière à ce qu’elle soit la plus petite possible par rapport à la taille du circuit électronique.
Répartition dans le transport en commun et l’incertitude sur l’état des prochaines services
Andrés Ricardo CÉSPEDES GARCÍA, Fabrice KOUAME, Daniel Alejandro TERÁN FERNÁNDEZ,
23/10/2022
Group 1
Introduction
Aujourd’hui le système de transport en commun est sans aucun doute le moyen le plus populaire pour se déplacer; il possède de nombreux avantages en réduisant les embouteillages et l’émission de gaz. Cependant, il y a plusieurs raisons pour lesquelles les gens sont réticents à prendre les transports en commun : le manque de confort, la saturation du système, l’incertitude sur l’état de saturation du service suivant, l’augmentation des véhicules personnels, etc. Ces problèmes dans les transports publics sont récurrents et doivent être résolus afin d’inciter d’avantages de personnes à son usage. Ce projet cherche à résoudre un vrai problème autour des moyens de transport.
Description de la recherche et terrain
2.1 Terrain
Afin de mieux connaître les problèmes qui minent les transports en commun en France en général et à Brest en particulier, nous avons été en immersion sur le terrain à la recherche d’informations. Ceci avait aussi pour but de mieux cerner le sujet et de connaître les problématiques réelles auxquelles tous les acteurs de ce domaine font face au quotidien.
Pour ce faire nous avons eu recours à différentes techniques d’enquêtes terrain :
- L’observation terrain
Nous avons commencé l’enquête terrain par une observation non-participante qui nous a fait prendre connaissance de certains faits et situations. Ceci, dans le but d’observer les personnes en situation et être capable de ressortir d’éventuels problèmes qu’il peut y avoir.
- L’entretien direct
Après la phase d’observation nous avons interviewé, sur place, des passagers et aussi des conducteurs de bus et de tramway en vue de recueillir leur sentiment et leur avis sur le trajet et les transports en commun en général. D’autres entretiens ont eu lieu dans des parcs, des rues, afin d’avoir un maximum d’informations.
Résultats et découvertes
On a trouvé des conclusions pertinentes concernant les passagers, les chauffeurs et le fournisseur de transport en Brest, bibus.
Le chauffeur perçoit qu’il n’existe pas de problème réel par rapport à la sécurité, mais il sait que les personnes âgés préfèrent être à l’avant du véhicule et être plus proche du conducteur car cela leur procure un sentiment de sécurité. C’est l’une des raisons pour lesquelles l’encombrement est plus accentué à l’avant des bus ou tramways que dans la partie arrière. Il y a des situations où le chauffeurs ou des contrôleurs du système (assistants de transport) demandent au passagers de se déplacer à la partie arrière, où il y a plus d’espace.
Les réponses des passagers sont diverses. On trouve que le problème commun est l’incertitude sur le meilleur choix de services, en dépendant du besoin du passager. Ils prennent leur décision en priorisant le temps du trajet et le confort. Par rapport à d’autres questions comme la sélection d’un wagon peut être arbitraire ou en accord avec la réduction de la distance entre la place choisie et la sortie du véhicule. Par rapport à des observations réalisées, on voit que il est commun d’avoir plus d’encombrement, même s’il y a des sièges disponibles à l’arrière du transport.
Après un entretien avec une collaboratrice du fournisseur Bibus, elle nous fait savoir que les problèmes d’encombrement ne sont pas des préoccupations couramment remontées vers la direction, et elle envisage partager la discussion avec l’équipe d’innovation de Bibus.
En conclusion, il existe des problèmes par rapport au confort et la décision de choix de passagers pour améliorer ses trajets dans des moyens de transport. On rencontre aussi des problèmes adjacents qui peuvent être liés à la sécurité et au confort.
2.2 État de l’art
En utilisant des outils de recherche habile sur l’intranet de l’IMT et sur sites académiques libres, la révision documentaire s’est concentrée sur l’identification de la problématique, ainsi que des solutions déjà existantes. Le résultat permet de développer plus la compréhension du sujet et les réelles conséquences négatives de celui-ci.
La problématique de l’encombrement a de nombreuses préoccupations différentes telles que les retards de transit et les coûts associés, l’augmentation du stress/de la fatigue liés aux déplacements et les pertes connexes de productivité économique, de santé et de sécurité, et le pickpocketing [1]. Certaines d’entre elles ont été exprimées dans les entretiens qu’on a mené. Il y a des usagers spécifiques comme les femmes enceintes, qui sont directement affectées par la façon de transporter les usagers puisque une expérience de trajet négative peut induire du stress et avoir un impact sur la grossesse et ses changements associés ce qui peut avoir des implications sur son bien-être et sa santé [2].
On a trouvé que l’encombrement dans le transport en commun et dans chaque moyen de transport a été examiné dans plusieurs villes et pays avec des méthodes différentes [1] où les résultats sont variés [3][4][5][6]. En général, l’encombrement est un facteur important qui affecte le bien-être des passagers, par conséquent, il influence les passagers pour choisir l’un ou l’autre moyen de transport [4], il aussi est commun que des usagers arrêtent d’utiliser le transport en commun et commencent à utiliser une voiture ou un vélo personnel [5]. Il convient de souligner que les principaux facteurs de décision sont le confort et le temps dans le transport [3], lesquels peuvent changer de manière significative les décisions de l’usager et son expérience [4].
Spécifiquement, dans la prise de décision des passagers quant au fait de prendre un tramway, un autobus ou encore le métro, des recherches montrent que c’est difficile d’établir une seule raison des usagers pour le choisir. Il est possible d’affirmer que, par exemple, en Corée du Sud, la distance à marcher à la destination est un facteur déterminant, mais est incertaine d’une manière générale[6].
Identification de la problématique
Après des recherches et l’enquête terrain effectuée, nous avons trouvé une problématique que nous jugeons intéressants et nous sommes prêts à traiter:
Comment aider le passager à prendre la décision concernant le choix du véhicule (présent ou suivant) ainsi que l’entrée dans ce véhicule afin d’améliorer son confort et donc sa satisfaction à utiliser ce moyen de transport?
La recherche a aidé à établir la réalité de la problématique initiale présentée dans différents environnements et des technologies déjà utilisées. Dans l’identification du problème, on peut voir qu’il y a un problème lié à d’autres dans le transport en commun comme le choix des passagers entre différentes méthodes de transport ou l’heure à laquelle le prendre. Il a de nouvelles considérations au moment d’identifier la problématique car il n’est pas seulement lié au confort, mais aussi au sens de sécurité et de diminuer le temps d’attente dans le transport.
Solutions déjà existantes
Il y a plusieurs propositions de solution à ces problématiques telles que montrées dans l’article indien publié dans l’organisation IEEE [7]. Il développe une solution en bas des travaux antérieurs avec différentes conceptions technologiques pour proposer et désigner un système optique qui utilise une caméra pour obtenir des images et identifier l’encombrement dans le bus. Le système permet de distinguer la condition du transport en quatre catégories: Very low, low, high et very high. Le travail décrit en [8] utilise des capteurs infrarouges (IR). Le système utilise des capteurs de proximité IR pour détecter la quantité de personnes présentes à l’intérieur du bus et utilise le GPS pour obtenir l’emplacement en direct du bus et l’affiche sur une page Web.
En [9], les auteurs ont développé un système dans lequel ils peuvent estimer la quantité des gens sur un environnement spécifique dans les images fixes. Ils ont utilisé une combinaison de méthodes telles que les points d’intérêt, l’analyse de Fourier, la décomposition en ondelettes, les caractéristiques GLCM et les détections de tête à faible confiance. En [10], les auteurs ont détecté l’affluence de passagers. Ils ont utilisé la fonction Haar et Algorithme Adaboost pour détecter la tête des passagers. Dans l’étude proposée par [11], les auteurs ont mis au point une technique basée sur les images. Ils ont utilisé des filtres pour modéliser la saturation pour différentes tailles de têtes. Une autre solution proposée par [10] utilise le GPS et la RFID. Les détails sur l’emplacement du bus sont fournis via l’appareil GPS et les RFID sont utilisées par les auteurs à l’entrée et à la sortie du transport pour calculer la quantité des sièges vacants dans les bus.
Cette problématique se connecte avec d’autres situations dans le transport en commun comme la localisation des bus, du tramway ou la création de systèmes intelligents de transport qui veulent avoir des impacts positifs dans les trajets du passagers [13].
Premières Hypothèses
Après avoir étudié la problématique et les solutions existantes, nous allons construire des hypothèses sur la solution à venir afin de la concevoir correctement.
- Les raisons d’insatisfaction des utilisateurs par rapport au transport sont liées au confort qui est dû à l’encombrement, au temps passé dans les arrêts à attendre et aussi à la sécurité.
- L’une des causes de l’inconfort des usagers est liée à l’incertitude de ceux-ci quant à l’état de saturation du prochain véhicule de transport (bus ou tramway).
- Il n’y a pas d’information d’encombrement disponible aux passagers pour choisir de meilleure manière leurs trajets.
- Le problème existe dans les systèmes de bus, tramway, métro et dans quelques trains locaux (i.e. Les trains TER).
References
[1]J. Pel, N. H. Bel, et M. Pieters, « Including passengers’ response to crowding in the Dutch national train passenger assignment model », Transportation Research Part A: Policy and Practice, vol. 66, p. 111‑126, août 2014, doi: 10.1016/j.tra.2014.05.007.
[2]E. O’Toole et N. Christie, « Pregnancy and commuting on public transport », Journal of Transport & Health, vol. 24, p. 101308, mars 2022, doi: 10.1016/j.jth.2021.101308.
[3]M. Kim, S.-P. Hong, S.-J. Ko, et D. Kim, « Does crowding affect the path choice of metro passengers? », Transportation Research Part A: Policy and Practice, vol. 77, p. 292‑304, juill. 2015, doi: 10.1016/j.tra.2015.04.023.
[4]Björklund et J.-E. Swärdh, « Estimating policy values for in-vehicle comfort and crowding reduction in local public transport☆ », Transportation Research Part A: Policy and Practice, vol. 106, p. 453‑472, déc. 2017, doi: 10.1016/j.tra.2017.10.016.
[5]Ş. İmre et D. Çelebi, « Measuring Comfort in Public Transport: A case study for İstanbul », Transportation Research Procedia, vol. 25, p. 2441‑2449, janv. 2017, doi: 10.1016/j.trpro.2017.05.261.
[6]Kim, S. Kwon, S. K. Wu, et K. Sohn, « Why do passengers choose a specific car of a metro train during the morning peak hours? », Transportation Research Part A: Policy and Practice, vol. 61, p. 249‑258, mars 2014, doi: 10.1016/j.tra.2014.02.015.
[7]V. Meghana, V. Sarode, D. Tambade, A. Marathe, et N. Charniya, « Automated Crowd Management in Bus Transport Service », in 2020 International Conference on Electronics and Sustainable Communication Systems (ICESC), juill. 2020, p. 104‑109. doi: 10.1109/ICESC48915.2020.9155692.
[8]Lavanya R, Sheela Sobana Rani K, Gayathri R, Binu D,’A Smart information system for public transportation using IoT’, International Journal of Recent Trends in Engineering and Research,vol.3,pp.222- 230,April-2017
[9]Bansal, K.S. Venkatesh, People counting in high density crowds from still images, 2015, [online] Available: https://arxiv.org/abs/1507.08445
[10]Wang and M. Tian, « Passenger Flow Direction Detection for Public Transportation Based on Video, » 2010 International Conference on Multimedia Communications, Hong Kong, 2010, pp. 198-201
[11]Zhang, D. Zhou, S. Chen, S. Gao and Y. Ma, « Single-Image Crowd Counting via Multi-Column Convolutional Neural Network, » 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, 2016, pp. 589-597.
[12]Selvapriya P R, M. Mundada, « IoT Based Bus Transport System in Bangalore », International Journal of Engineering and Technical Research (IJETR), février 2015
[13] L. Raju, S. Sobana Rani, G. Ram, et B. Dennison, « A Smart Information System for Public Transportation Using IoT », International Journal of Recent Trends in Engineering & Research, vol. 3, p. 222‑230, avr. 2017, doi: 10.23883/IJRTER.2017.3138.YCHJE.
[14]Rajput, M. Chaturvedi, et V. Patel, « Opportunistic sensing based detection of crowdedness in public transport buses », Pervasive and Mobile Computing, vol. 68, p. 101246, oct. 2020, doi: 10.1016/j.pmcj.2020.101246.
