
Robot IA – Synthèse du projet CodeV
I – Contexte/Projet/Equipe
Dans un monde où la robotique et l’intelligence artificielle sont en plein essor, il est intéressant et nécessaire d’envisager des projets de petite envergure afin d’acquérir les bases de ce domaine, tels que le machine learning. Ce projet consistant à équiper un petit robot motorisé (plateforme JetBot) d’une caméra et lui implanter un code lui permettant de mémoriser et parcourir différents circuits adaptés est alors parfait pour commencer son chemin dans le monde de la robotique et de l’implémentation robotique.
Les objectifs du projets sont donc essentiellement de prototyper à taille réduite ce qui pourra par la suite être adapté à taille réelle en voiture autonome, avec un robot capable de se déplacer d’un point A à un point B de manière totalement autonome, tout en analysant son environnement (les panneaux, le marquage au sol…).
L’équipe sur le projet est composée de 4 étudiants de FISE A1 : Arthur Didier, Aymen Kallala, Violette Castells et Marianne Bellery. Celle-ci a été guidée et encadrée par Sylvie Kerouedan et Nicolas Farrugia.
II – Réalisation
- Environnement
La création de l’environnement est passée par la conception et l’impression de panneaux. Les visuels ont tous été créés sur PhotoShop dans un style se rapprochant au maximum des panneaux de circulation réels à l’échelle du robot. Ils ont ensuite été imprimés sur du papier collant par les encadrants FabLab. La structure des panneaux a quant à elle été produite sur Tinkercad puis imprimée grâce aux imprimantes 3D du FabLab.






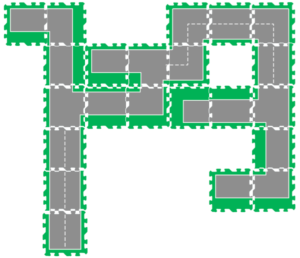
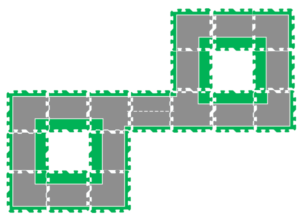
En parallèle le besoin d’avoir une route modulable étant évident, celle-ci à été conçue selon un système de pièces de puzzle. De même les visuels ont été réalisés sur PhotoShop de manière à évoquer clairement une route aux utilisateurs, puis imprimés par le FabLab sur des papiers épais selon un format 50cmx50cm.
- Code
Le code s’est divisé en deux parties distinctes : l’implémentation du suivi de la route et l’implémentation de la reconnaissance des obstacles et limitations. La première permettant au robot d’avancer sur la route en limitant le franchissement des lignes continues blanches. La seconde faisant en sorte que le robot reconnaisse son environnement et agisse en fonction des objets qu’il rencontre. Les types d’objets étant également en deux sous catégories : les obstacles et les panneaux de circulation.
L’implémentation du code est également passée par la collecte de données.
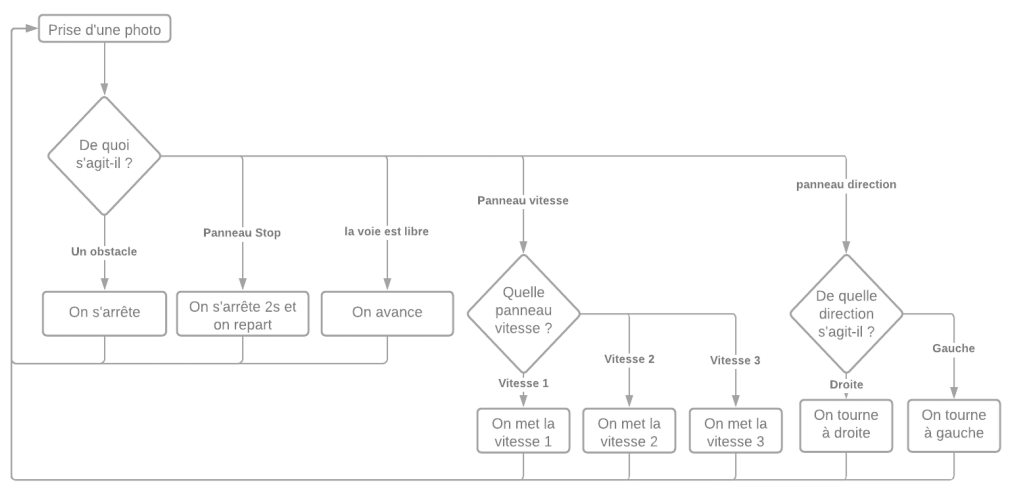
Quant aux obstacle l’architecture de décision finale est la suivante :
- Validation
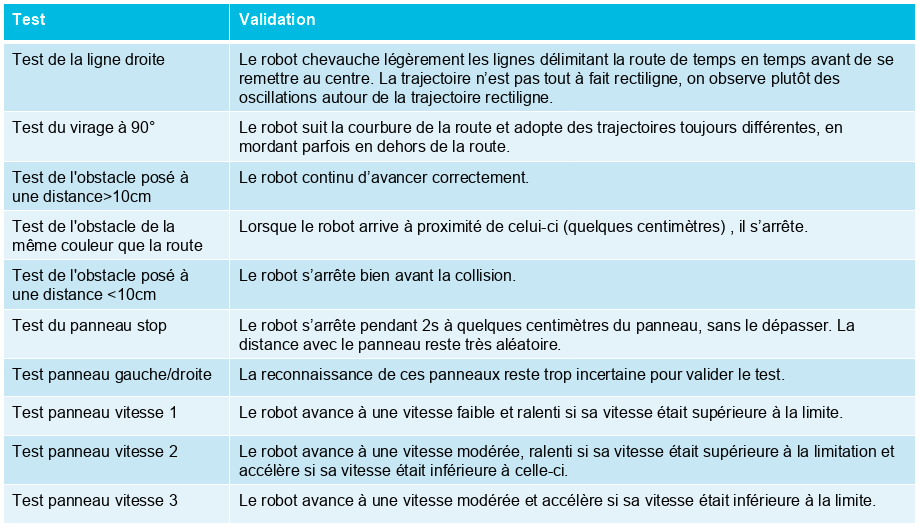
Afin de valider les avancées du projet une liste de tests a été réalisée. Les résultats de celle-ci sont présentés dans le tableau ci-dessous :
III – Composants de l’ensemble environnement + robot
Pour le robot :


Le robot se basera sur la plate-forme Jetbot développée par Nvidia. Avec notamment comme composants ceux du kit JetBot Nano et une batterie.
Pour les pièces puzzles la structure générale est la suivante :

IV – Protocole d’utilisation et scénario
Scénario :
L’utilisateur souhaite que le robot se déplace d’un point A à un point B suivant une route avec des contraintes (marquage au sol, panneaux de signalisation…) appelé ici environnement.
- L’utilisateur pose le robot au sol dans cet environnement au point A. L’utilisateur allume ensuite le robot qui devra alors parcourir le circuit de manière autonome.
- Si le robot arrive dans une impasse il devra soit faire demi-tour s’il constate un espace suffisant pour l’effectuer ou reculer jusqu’à l’intersection précédente dont le choix a mené à l’impasse afin de prendre une nouvelle route.
- Lorsque le robot rencontrera un obstacle, si l’espace est suffisant pour passer alors le robot contournera l’obstacle en laissant une distance minimale d’1 cm entre lui et l’obstacle. Si l’espace restant est trop petit alors le robot devra soit faire demi-tour soit reculer jusqu’à l’ancienne intersection comme expliqué précédemment dans le cas de l’impasse.
- Lorsque le robot arrive au niveau d’un passage piéton il adoptera une vitesse d’avance réduite.
- Lorsqu’un piéton est sur le passage alors le robot devra s’arrêter à au moins 1 cm du passage piéton.
- Lorsque le robot rencontre un des 4 panneaux obligatoires, il suivra l’indication.
- Si un bug de reconnaissance d’obstacle ou de prise de décision par le robot est constaté par l’utilisateur, celui-ci doit l’arrêter et le repositionner 10 cm en amont sur le circuit. Puis il indique par la procédure qui sera développée et donnée dans le mode d’emploi, qu’il y a une erreur afin que l’algorithme d’apprentissage puisse le prendre en compte.
- Une fois arrivé au point B, le robot s’arrête et l’utilisateur éteint le robot.
V – Perspectives et pistes d’amélioration
Finalement, ce projet est voué à être transmis et amélioré par de futures équipes. Nous avons effectivement fait en sorte de rentre le code le plus clair possible avec une architecture intuitive pour les différentes parties.
Pour poursuivre ce projet, il faudrait mettre en commun l’ensemble du code (suivi de route et détection des objets), pour que le robot soit capable, sur un circuit complet, à la fois d’éviter les obstacles, de reconnaitre les panneaux et suivre la route. En effet, il est capable de tout faire mais chaque code fonctionne séparément des autres. Cela devra aussi être accompagné d’une amélioration de certains algorithmes afin de garantir un comportement plus robuste et plus juste dans les différents cas d’utilisation.
De plus, on pourrait tenter de remplir les fonctions complémentaires que nous avions évoquées dans le cahier des charges. En particulier, les fonctions liées à l’esthétique du robot, au bruitage ainsi qu’au rajout d’options secondaires vis-à-vis de la circulation du robot sur une route. On pourrait aussi rajouter dans la base de données de nouveaux obstacles et panneaux. Par exemple, on pourrait imaginer rajouter dans la base de données des bonhommes, de différentes tailles et formes modélisant les piétons. On pourrait aussi créer de nouveaux types de panneaux de circulation.
Enfin, il serait aussi intéressant d’améliorer les performances du robot, par exemple, son autonomie ou encore la puissance de ses moteurs.
