
Mugs BRAIn
La presse à chaud ne sert pas qu’aux étudiants en période de campagne de listes étudiantes ! Le département BRAIn a fait toute une série de mugs personnalisés pour ses membres.
Le logo BRAIn d’un côté, une photo retouchée de l’autre et hop : des goodies fait fablab !

Couture & broderie au Téléfab !
Le Téléfab organise un mois Couture & broderie !
Au programme :
mercredi 15 mars de 12h30 à 13h30 : initiation à la brodeuse et à la machine à coudre numérique
jeudi 23 mars de 13h30 à 15h : initiation Créer mon motif de broderie sur Ink-stitch
jeudi 23 mars de 15h à 18h : Atelier réparation de textile et initiation à la couture :
3 couturières du Centre social de Plouzané viendront t’apprendre les secrets des glissières et des boutonnières ! Chaque couturière peut accompagner 3 personnes par couturière en même temps. Tu peux venir moins de 3h !
vendredi 24 mars et 7 avril de 12h30 à 13h30 : initiation à la brodeuse et à la machine à coudre numérique
samedi 8 avril de 14h à 16h : initiation Créer mon motif de broderie sur Ink-stitch
mercredi 12 avril de 12h30 à 13h30 : initiation à la brodeuse et à la machine à coudre numérique
jeudi 13 avril de 13h30 à 17h : Atelier Upcycling de chemise :
Viens avec une vieille chemise et transforme la ! Les débutants peuvent créer pochons, sac à pain ou à bouteilles, housse de coussins. Déjà à l’aise avec une machine à coudre ? Tu voudra peut-être te lancer dans al réalisation d’un bavoir ou d’un tote-bag. Quant aux pros de la machine à coudre, un défi tablier les attends ! Bien sûr chacun sera libre de choisir sa ou ses réalisations. Pense bien à amener ta ou tes vieilles chemises ! On en trouve en friperie pour 1 ou 2 euros.

N’oublie pas de t’inscrire !
Les sciences participatives au Telefab – LittObs



Prochaine session pour continuer à assembler les capteurs jeudi 20 avril de 16h30 à 18h !
Objectif : aboutir à ce capteur !

Tout est documenté en ligne sur WikiFactory.
LittObs, c’est quoi ?
LittObs, c’est un programme de recherche participative qui vise à déployer un réseau d’observatoires océanographiques littoraux, grâce aux citoyens habitant le territoire. Ces observatoires sont constitués d’une ligne de mouillage, équipée de trois capteurs répartis dans la colonne d’eau.
Ces capteurs enregistrent les paramètres physiques, chimiques ou biologiques de l’eau (température, salinité, chlorophylle, etc…). Ils permettent d’observer l’impact des fleuves sur les eaux côtières.
Des volontaires fabriquent les instruments nécessaires (ligne mouillage lestée, capteurs) lors d’ateliers de fabrication. Aucun pré-requis technique n’est requis, tout le monde peut participer et il y en aura pour tous les niveaux ! Une fois fabriqués, ces instruments seront testés en mer pour s’assurer de leur bon fonctionnement, sortie auxquelles peuvent participer les volontaires. Une flotte bénévole déploie ensuite les observatoires.
Définir des taux de remplissage différents sur une même pièce
Si vous imprimer un personnage, un robot ou encore un trophée, vous pouvez avoir besoin de paramétrer de manière personnalisé chaque partie de votre objet.
Dans ce cas, vous pouvez cliquer sur « Support blocker » dans la barre d’outil à gauche (celle où vous changer les dimensions et l’orientation). Quand votre objet est sélectionné, un cube bleu va apparaitre dessus. Ce cube peut être redimensionné et déplacé avec les même outils que d’habitude, de manière à englober la partie de votre objet que vous voulez paramétrer différemment.
Une fois ce cube bien placé et dimensionné, vous pouvez cliquer sur « Per Model setting » dans la même barre d’outil, puis sur « Modifiy setting for overlaps ». Là vous pouvez changer tous les paramètres que vous souhaitez pour cette partie de l’objet uniquement.
Cette vidéo montre comment faire avec les version récentes de Cura (5.1.1) et celle-ci pour des versions plus anciennes (2.0, comme celles installées sur les Linux du Téléfab).
Le Téléfab au service de la médiation
Mercredi dernier, les 16 étudiants de l’intersemestre « Partager les sciences » ont animé leur atelier pour des publics très différents : maternelles, primaires, collégiens, lycéens et public familial.
Planche de Galton pour expliquer l’intérêt des mathématiques dans la prévision des résultats d’une expérience, jeux autour du fonctionnement de Dall-E, visite de fablab et démonstration de pose de stent pour expliquer l’utilité de l’impression 3D dans le domaine de la santé, ateliers autour des aurores boréales ou encore autour du vol des oiseaux : les 5 équipes ont choisi des sujets très variés.
Au delà de la connaissance du public, de l’adaptation du discours et du contenu, de la posture, de la gestion de groupe, une des bases en médiation scientifique est aussi d’utiliser la pédagogie active. Autrement dit ? Faire faire, mettre le public en action pour qu’ils mettent en œuvre tout ou partie de la démarche d’investigation.

La visite du fablab pour des lycéens
Une répartition selon la loi normale pour des collégiens
Démonstration autour d’une planche de Galton made in Téléfab

Un atelier pour comprendre ce qu’est une image matricielle pour un public familial

Un échantillon du matériel pédagogique produit pendant l’intersemestre !
Ils ont appris, parfois à la dure, qu’animer c’est parfois aussi savoir renoncer à vouloir aller trop loin, être humble et raisonnable dans ses objectifs, savoir dire qu’on ne sait pas.
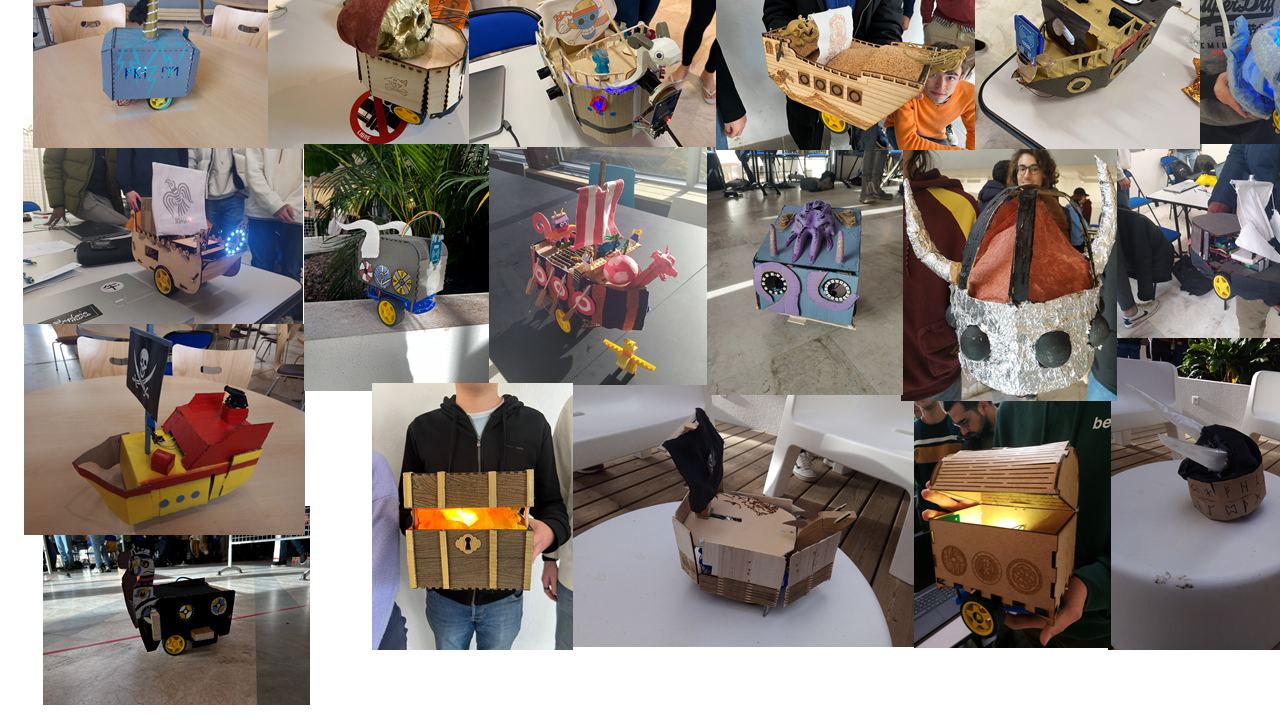
La course de robots des FISE1 !
Chaque année, les étudiants ingénieurs de première année (FISE1) doivent se forment en groupe à la RFID, à l’Arduino et à la création d’application. Le groupe plateforme Arduino avaient déjà créé de belles lampes en décembre !

En janvier, une semaine intensive a permis à chaque groupe de mettre en commun ses compétences pour créer une voiture téléguidée et capable de lire et d’écrire sur des tags RFID.
Matériel électronique de rechange, soudures en urgence, découpes laser, impression 3D, couture, modelage, sculpture, flocage de voiles, peinture… Si les canons à eau étaient interdits (oui, on réutilise le matériel électronique d’une année sur l’autre), les chutes et les batailles navales entre voitures customises en drakars et en bateau pirates ont bien eu lieu durant la course ! Un sacré test pour la robustesse des carrosseries : ça oblige aussi à penser durabilité et facilité de maintenance…
Petite contrainte supplémentaire : les étudiants n’avaient droit qu’à une plaque de bois et à 2h d’impression par groupe. Pas facile quand on se trompe dans les dimensions de ses plans ou quand ils faut ré-imaginer son design ! Si je leur ai donné ces contraintes, c’est pour les obliger à respecter des quantités limitées de ressources, à penser récupération, créativité, réemploi… Bref à mettre en œuvre des compétences que j’aimerai voir devenir des réflexes chez nos futurs ingénieurs !
Un grand bravo à pour la créativité et l’adaptabilité dont ils ont fait preuve pour créer leur carrosserie de voiture sur le thème Pirates & Vikings ! Mention spéciale pour le gagnant du design : le drakar avec proue sculptée et peinte !
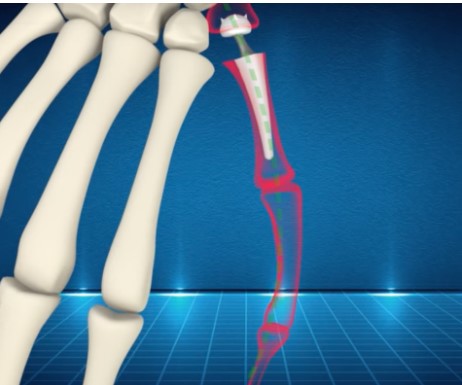
Des os au Telefab
La médecine s’inscrit progressivement vers une médecine à 5P : Personnalisée, Préventive, Prédictive, Participative et une médecine des Preuves. Dans le cadre de la chirurgie de la main et de celle de l’articulation trapézo-métacarpienne, il y a une nécessité d’une prise en charge personnalisée due à des variations anatomiques inter-individuelles.

De plus, il a été recensé entre 3000 et 4000 poses de prothèses par an en France, soit une augmentation multipliée par dix depuis les années 2005-2006. Cela est due en partie à l’amélioration des technologies de chirurgie.
Une des causes de l’utilisation de ces prothèses est l’arthrose et plus particulièrement la rhizarthrose (arthrose de l’articulation trapézo-métacarpienne). En effet, selon l’Inserm, l’arthrose de la main représente 40% des cas d’arthrose, ce qui équivaut à 4 millions de français. Un des facteurs de risques responsable du développement de cette maladie dans
la population française est le vieillissement de la population.
Dans le cadre du projet de 3 ème année d’ingénieur, nous devons réaliser un algorithme d’IA permettant de segmenter les os de l’articulation trapézo-métacarpienne impliqués dans l’arthrose (trapèze et premier métacarpien) et ceux adjacents (trapézoïde et deuxième métacarpien) à
partir d’images scanner du CHRU de Brest.
Par la suite, à partir de la segmentation des os, nous imprimons en 3D les structures osseuses afin de
mieux comprendre leurs anatomies et ainsi anticiper l’utilisation de futurs instruments de chirurgie.
En effet, nous espérons permettre une optimisation de la procédure pré-opératoire consistant à adapter
les outils et la prothèse à l’anatomie du patient.
Nous avons donc imprimé 4 prototypes au Téléfab.

CoOCKing : Article sur la solution technique
Auteurs : Adrien CHABOD, Lucas DEHENNE, Louise THEOPHILE et Gatien TIREL
Introduction
Notre groupe travaille à l’élaboration d’un prototype de système de gestion des stocks pour les restaurateurs.
Nous voulions tout d’abord traiter un sujet sur le thème de la restauration et ainsi répondre aux besoins des restaurateurs. Afin de comprendre les problèmes présents dans ce secteur, nous avons procédé à une recherche de l’état de l’art et surtout à des entretiens sur le terrain auprès de divers restaurateurs et de divers métiers au sein de la restauration. De plus, nous avons réalisé nos entretiens auprès de différents types de restaurants afin d’essayer de couvrir toutes les problématiques possibles dans le secteur de la restauration : une brasserie, un fast-food, un restaurant gastronomique et un restaurant familial.
Après avoir analysé leurs réponses et mis en évidence les problèmes qu’ils rencontrent au quotidien (no show, manque de personnel, coût de la matière,…), nous avons choisi de nous focaliser sur la gestion des stocks et spécialement la gestion des stocks de fond. Ainsi, nous cherchons à trouver un moyen de faciliter la lisibilité et la gestion des stocks au sein d’un restaurant afin de libérer du temps pour réaliser d’autres tâches. Notre prototype devait être facilement utilisable par n’importe quel employé du restaurant et ne pas leur faire perdre du temps.
Notre prototype peut se découper en trois parties : l’étiquetage, le scan de l’étiquette d’un produit et la manipulation de la base de données à partir d’une interface utilisateur.
Étiquetage
Ressources :
- Imprimante 3D et PLA
- Solidworks
Les stocks d’un restaurant sont principalement séparés en caisses, en cartons ou en palettes. Notre but était de réussir à créer un système d’étiquetage des stocks qui soit pratique, adaptable à tout type de contenant et le moins polluant possible.
Pour cela nous avons choisi d’utiliser la technologie RFID 13,56 MHz. Ainsi, pour étiqueter un produit dans le stock d’un restaurant, il suffit de lui attribuer une carte RFID, qui possède un identifiant unique et permet donc son identification directe. De cette façon, chaque identifiant peut être attribué à un produit et son stock dans la base de données.
La première idée a été d’utiliser des tags RFID autocollants
qu’on accrocherait directement à la caisse. Cette solution est simple et utilisée dans de nombreux endroits où la gestion des stocks est optimisée (magasins comme Décathlon par exemple). Mais cela poserait un problème de gaspillage car ce type d’étiquette est difficilement réutilisable. Une des raisons pour un restaurateur d’avoir un système de gestion des stocks est aussi de lui permettre de limiter le gaspillage, notamment le gaspillage alimentaire. Ici nous aurions eu un problème de gaspillage de matériel électronique, car à chaque fois que le restaurateur finit une caisse ou une palette il la jette et jette donc l’étiquette RFID avec. Nous avons alors opté pour de simples cartes RFID que l’on pourrait réutiliser à la demande.
Pour fixer la carte à la caisse (ou au carton), nous avons modélisé (sur Solidworks) et imprimé (imprimante 3D) un porte carte. Il peut être fixé sur un carton grâce aux pics présents sur une de ces faces comme on peut l’apercevoir sur les illustrations ci-dessous. Le trou sur le dessus du support de carte permet d’y faire passer une ficelle ou un serflex pour qu’on puisse l’accrocher à une caisse par exemple. L’impression de ce support a été réalisée en PLA qui est un matériau naturel, biodégradable et réutilisable et qui est utilisé lors de l’impression de nos pièces avec une imprimante 3D.
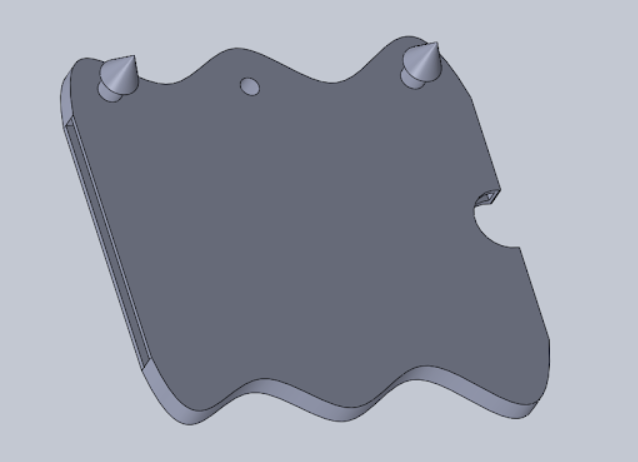
Schéma 1 : Modèle Solidworks du porte-carte
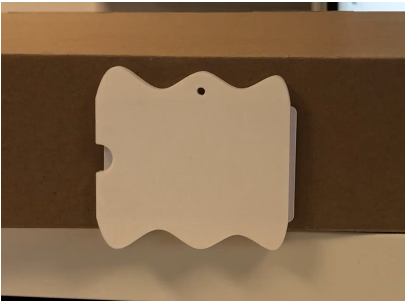
Schéma 1 bis : Porte carte et carte RFID fixés sur un carton
Scan d’un produit
Ressources et matériels :
- Solidworks
- Visual Studio Code
- Imprimante 3D et PLA
- Fils mâle-mâle
- Raspberry Pi 3B+
- Lecteur RFID HF 13,56 MHz
- Cartes RFID 13,56 MHz
- 4 piles rechargeables de 1,2 V
- Un boitier pour les piles
Le scan d’un produit se fait donc en utilisant la technologie RFID 13,56 MHz comme nous l’avons vu dans la partie précédente. Nous avons choisi cette technologie haute fréquence car elle offre un bon compromis portée et puissance. La portée est de 5 cm environ et la puissance du lecteur RFID correspond au choix d’alimentation et aux capacités de la carte Raspberry Pi 3 B+. Le choix du lecteur s’est alors porté sur le type RC522, lecteur compatible avec les fréquences de 13,56 MHz et disponible au Fablab.

Schéma 2 : Cartes RFID utilisées

Schéma 3 : Lecteur RFID RC522
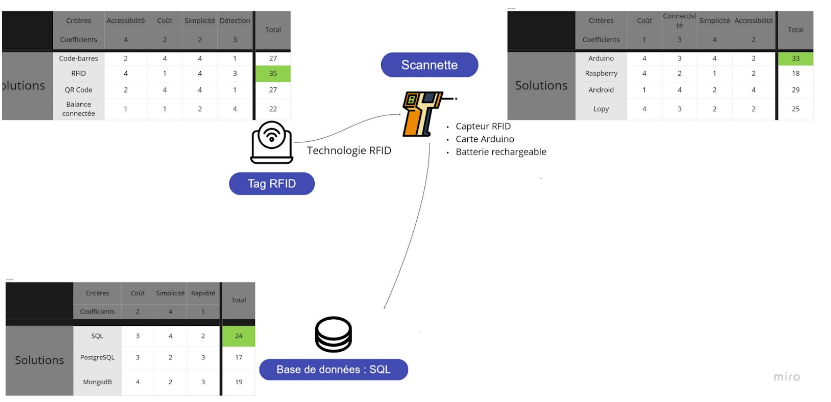
Schéma 4 : Architecture de notre premier prototype
À noter qu’il y a eu une évolution entre la vision que nous avions de notre premier prototype et notre prototype final. Au départ, nous étions partis sur la carte de commande Arduino car nous étions plus à l’aise avec cette technologie mais nous nous sommes par la suite tournés vers la carte de commande du type Raspberry qui possède plus d’options et qui nous semblait plus adaptée pour notre solution finale. En effet, on peut notamment héberger un serveur sur les cartes de commande Raspberry ce qui nous a été utile pour la solution réalisant l’interface utilisateur pour la gestion et la visualisation des stocks.
Montage électronique :
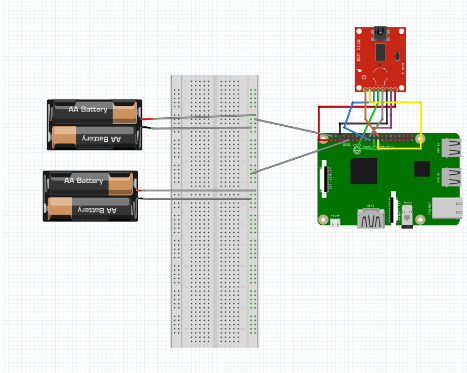
Schéma 5 : montage électrique de notre prototype
Le montage est constitué de trois composants simples : un lecteur RFID HF (en rouge) qui est basé sur le circuit RC522, une carte électronique de type Raspberry Pi 3 B+ (en vert) et son alimentation portable. L’alimentation est faite de 4 piles rechargeables de 1,2V chacune. Ainsi ces 4 piles mises en série atteignent environ les 5 volts nécessaires à alimenter la Raspberry. Le lecteur RFID est composé de 8 pins (3.3V, masse, reset et les protocoles) tous reliés à la Raspberry suivant le montage ci contre.
Nous avons intégré ce montage dans le modèle de scannette que nous avons réalisé sur Solidworks et imprimé en 3D en matériau PLA. Ce premier prototype permet de comporter tous les éléments en son sein et ainsi faciliter la liberté d’utilisation pour le restaurateur qui peut donc l’emporter librement dans ses stocks.
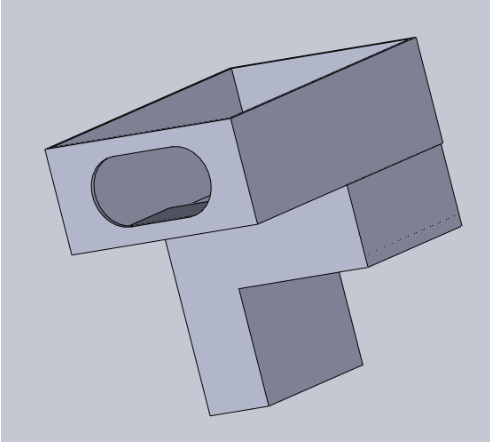
Schéma 6 : Modèle Solidworks de la scannette

Schéma 7 : Objet scannant l’étiquette
Manipulation de la base de données
Ressources et matériels :
- Visual Studio Code
- Fils mâle-mâle
- Raspberry Pi 3B+
- Alimentation
- Carte Micro SD
- Connexion Internet
A. La partie logiciel
La carte Raspberry Pi 3B+ utilise le système d’exploitation Raspberry Pi OS qui est un dérivé de la distribution Linux appelée Debian (l’une des distributions les plus utilisées au monde). À ce titre, Raspberry PI OS embarque tous les outils disponibles sur Debian. On peut y accéder via une interface classique (souris/clavier), mais aussi à distance via le protocole SSH.
Le site web est hébergé directement sur la Raspberry pour des questions de sécurité et de coûts. La création d’un serveur sous Raspberry s’est faite à l’aide de l’installation des logiciels Nginx, Python et Python-Pip sur la carte de commande.
Python est un langage de programmation interprété relativement simple à apprendre permettant la création de programmes informatiques, mais aussi de site Web via son module Django. Python-pip est le gestionnaire de paquets de python permettant d’utiliser des modules complémentaires sans avoir à le créer en partant de zéro.
Dans un premier temps, nous avons utilisé Nginx comme serveur web pour distribuer notre application, Nginx est un serveur fortement utilisé et connu de notre équipe ce qui en à simplifié le déploiement. Il peut être utilisé comme serveur Web ou/et comme reverse-proxy.
Comme développé de manière détaillée ci-dessous, nous avons utilisé Django pour la version 2 du projet. Le module Django est un module Python qui permet la création et la distribution (si utilisation de la configuration par défaut) d’un site web dans ce langage directement accessible via le port 8000/TCP en écoute sur l’adresse localhost (uniquement accessible depuis la machine sur laquelle il tourne). Même si utilisée pour le développement de l’application, la configuration par défaut n’est pas souple. Il est évidemment possible de changer celle-ci, mais il faut ajouter manuellement les adresses d’écoute. De plus, il est plus compliqué d’utiliser les paramètres de chiffrement (Certificat SSL) directement depuis Django.La solution permettant de répondre à cela est la mise en place d’un reverse proxy. Il s’agit d’un logiciel permettant de transmettre les requêtes à un serveur interne (par exemple un serveur ne disposant pas d’adresse publique ou derrière un pare-feu.). De plus, nous pouvons simplement y intégrer un certificat SSL permettant l’accès sécurisé au site (utile pour transmettre des mots de passe par exemple).
Nous avons fait le choix de mettre en place le logiciel Nginx pour jouer le rôle de reverse-proxy, car c’est un des logiciels les plus utilisés et nous l’avions déjà utilisé dans d’autres projets.
B. La base de données
Les informations récupérées grâce à la scannette doivent ensuite interagir avec la base de données. Nous avons créé la base de données en utilisant du SQL sur SQLite-3, le langage utilisé par défaut par le module Django de Python3. Cette base de données possède 3 tables : la table produit, étiquette et unit (pour les unités des produits). L’id du produit est une clef primaire au sein de cette table.
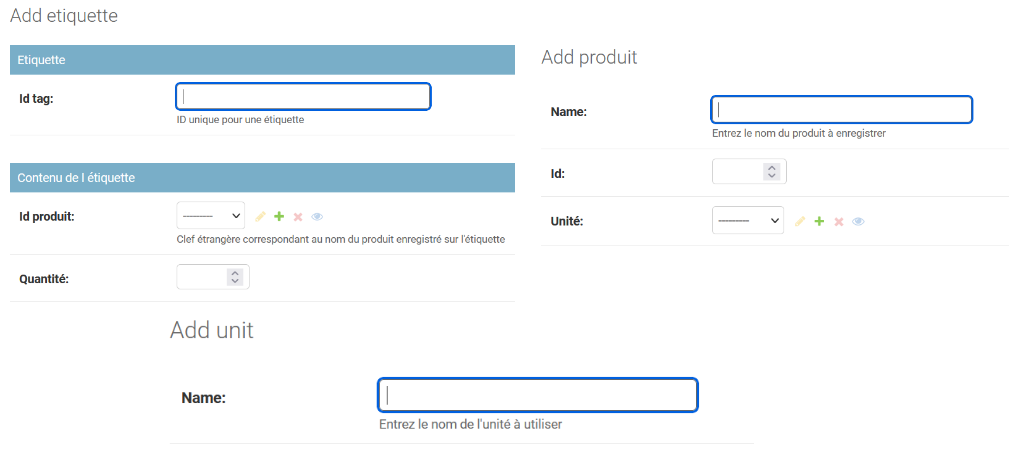
Schéma 8 : Visuel du site codé sur Django représentant les 3 tables de la base de données
C. Le site web
La dernière grande étape consistait à coder l’interface utilisateur : le site web.
Nous avons d’abord fait une première version du site internet de façon classique (langages HTML, CSS, JavaScript et Ajax). Dans cette première version, nous avions utilisé la librairie Bootstrap afin de simplifier le codage et l’ergonomie du site. La librairie Bootstrap est une collection d’outils utiles à la création du design de sites et d’applications web. Elle simplifie donc la création et le design des objets comme les boutons, les menus, les fenêtres ou encore les tableaux. Cependant, l’adaptabilité du codage avec la base de données était assez contraignante et pouvait ainsi être un frein pour s’adapter aux demandes de chaque restaurateur. En effet, dans cette première version, la base de données était stockée dans un fichier Ajax sous forme de dictionnaire. Ainsi, cette solution n’était pas optimale d’un point de vue de la sécurité ou encore de la redondance. De plus, les unités de comptage des quantités (caisses, cartons, kg, palettes…) ne pouvaient pas être modifiées par l’utilisateur, ajoutant une contrainte en plus concernant la simplicité d’utilisation. Enfin, cette première version ne disposait pas de version consultation des produits et ainsi tous les utilisateurs pouvaient modifier les stocks du restaurant.

Schéma 9 : Première version du site internet permettant la gestion des stocks.
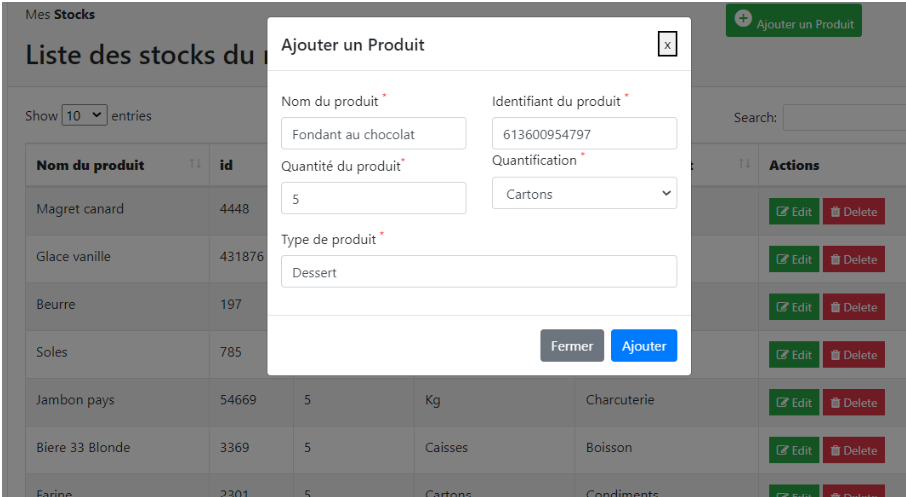
Schéma 9 bis : Première version du site internet, fenêtre permettant l’ajout/ la modification d’un produit.
Pour la deuxième version nous avons décidé de coder en Django.
Django est un module du langage de programmation Python. Coder en Python nous permet de coder l’entièreté du backend du projet en Python, ce qui, à terme, facilite la maintenance du site, ainsi que l’implémentation de nouvelles fonctionnalités. De plus, ce module automatise de nombreux aspects de gestion d’un site, notamment la version administrateur du site, d’où son l’utilisation.
Sur la deuxième version, il y a deux modes d’utilisation possibles : la consultation et la modification des stocks.
En mode consultation, l’utilisateur peut seulement consulter l’état actuel des stocks : le nombre de produits dans les stocks et le stock total pour chaque produit. Ce mode est fait par exemple pour être affiché en permanence dans le local à stock afin de savoir à l’aide d’un simple clic l’état des stocks actuels.
En mode modification l’utilisateur doit être en mesure de faire plusieurs actions vis à vis des stocks du restaurant :
- Voir les stocks déjà enregistrés (produits et étiquettes liés aux produits).
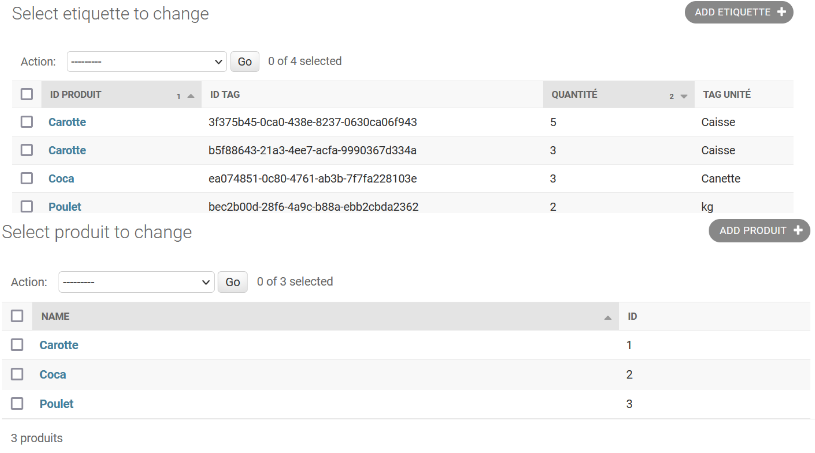
Schéma 10 : Pages internet permettant la consultation des produits et des étiquettes dans les stocks.
- Ajouter un produit. Dans l’onglet Produits, on ajoute un nouveau produit en cliquant sur le +. On initie ensuite le nom d’un produit, son id dans la table des produits et son unité (cartons, caisses, kg,…), puis il faut cliquer sur Save pour confirmer l’ajout de ce produit dans les stocks.
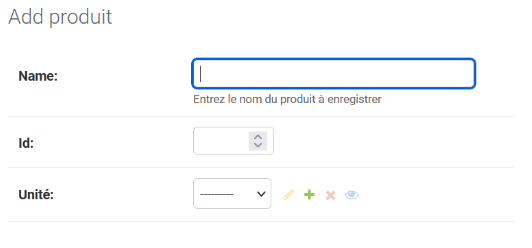
Schéma 11 : Page internet permettant l’ajout d’un produit dans les stocks.
- Ajouter une étiquette. Dans l’onglet Étiquette, on ajoute une nouvelle étiquette en cliquant sur le +. Cette étiquette possède un id de base pré-rempli qui sera par la suite automatiquement modifié lors de la lecture du tag RFID par la scannette. On choisit le produit correspondant à cette étiquette et on lui affecte une quantité au vu de son unité. Il faut ensuite cliquer sur le bouton Enregistrer un TAG RFID puis passer la scannette devant l’étiquette RFID afin de lire l’identifiant RFID associé à cette étiquette. Le programme lit et assigne alors automatiquement l’id de cette étiquette RFID à la nouvelle étiquette que nous sommes en train de renseigner dans les stocks du restaurant.
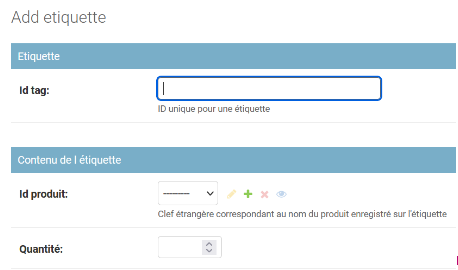
Schéma 12 : Page internet permettant l’ajout d’une étiquette dans les stocks.
- Supprimer un produit, Dans l’onglet Produit, on sélectionne le ou les produits que l’on souhaite supprimer. Puis il faut aller dans le menu déroulant Action et sélectionner Delete selected products puis cliquer sur Go. Une nouvelle page apparaît, nous demandant si nous sommes sûr de vouloir supprimer le ou les produits sélectionnés. Il faut donc ensuite cliquer sur Yes, I’m Sure pour confirmer la suppression ou sur No, take me back pour annuler la suppression.
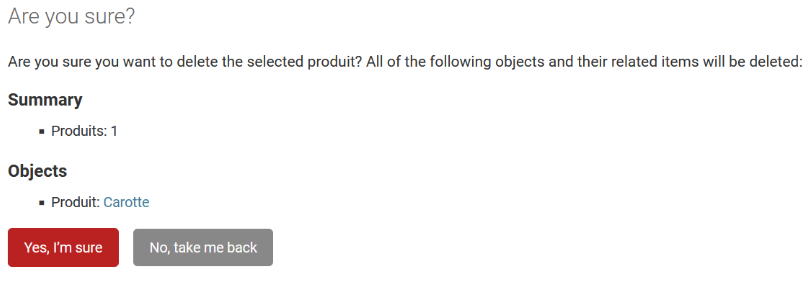
Schéma 13 : Page internet permettant la suppression d’un produit de nos stocks.
- Supprimer une étiquette, Dans l’onglet Étiquette, on sélectionne le ou les étiquettes que l’on souhaite supprimer. Puis il faut aller dans le menu déroulant Action et sélectionner Delete selected tags puis cliquer sur Go. Une nouvelle page apparaît nous demandant si nous sommes sur de vouloir supprimer le ou les étiquettes sélectionnées. Il faut donc ensuite cliquer sur Yes, I’m Sure pour confirmer la suppression ou sur No, take me back pour annuler la suppression.

Schéma 14 : Site internet permettant la suppression d’une étiquette de nos stocks.
Résultats et perspectives
Le projet CoOCKing s’est conclu par la réalisation d’un prototype permettant de consulter l’état des stocks actuels du restaurant et de les modifier. L’identification des produits est réalisée par un étiquetage suivant la technologie RFID. La visualisation des stocks en temps réel est possible grâce à un site internet possédant deux versions : une version consultation permettant de consulter les stocks et une partie modification permettant de modifier l’état des stocks.
En effet, on arrive à automatiquement ajouter un produit et ajouter une étiquette associée à ce produit grâce à la lecture de l’identification RFID de l’étiquette avec la scannette. La suppression du produit ou de l’étiquette est elle aussi disponible sous la version administrateur du site.
Cependant, il manque la partie suppression d’une étiquette à partir de la scannette, fonctionnalité qui semble essentielle concernant la facilité pour un restaurateur de gérer ses stocks. Cette partie donnerait vraiment sens à notre objet communicant et faciliterait réellement la gestion des stocks de fond pour un restaurant.
De plus, nous avons conscience que notre projet n’est qu’une embauche d’un système qui pourrait être plus sophistiqué. En effet, le marché des solutions de systèmes de gestion des stocks existe déjà et est plus complexe.
Ainsi, la facilité d’utilisation pourrait être améliorée. Le fait que l’utilisateur ait la possibilité de scanner seulement une étiquette par une étiquette le contraint à réaliser des aller retour entre son ordinateur et ses produits. Ainsi, une liste des étiquettes non enregistrées pourrait être implémentée et être triée par ordre de scannage. En outre, un buzzer ou une alerte lumineuse pourrait être ajouté afin de savoir si l’identifiant de l’étiquette a bien été lu et de savoir l’état de fonctionnement et de batterie du système.
D’un point de vue esthétique, nous pourrions rendre la prise en main de la scannette plus facile, en affinant le manche par exemple ou en lui arrondissant les contours. De plus, le choix de la carte de commande peut être lui aussi modifié afin de choisir des composants plus petits et ainsi améliorer l’ergonomie de la scannette.
Nous pourrions aussi optimiser l’autonomie et la consommation de notre système. En effet, par soucis de temps nous n’avons pas installé d’interrupteur sur la scannette. Par conséquent, elle est allumée en continu. Relier l’alimentation à un interrupteur serait une bonne étape d’amélioration.
Annexes
A. Vidéo de démonstration
(Lien vers la vidéo de démonstration du prototype : https://drive.google.com/file/d/1OtxhmIcvaCxDwfNo9N53S0vYKPGifAj1/view?usp=share_link )
B. Github
Voici le lien vers notre Github : https://gitlab.imt-atlantique.fr/cooc22-coocking
Il contient les différents codes utilisés (des différentes versions du site et ceux implantés dans la Raspberry afin de lire et de transmettre les identifiants RFID) et les modèles d’impression 3D (en format STL).
Traçabilité des vêtements : Enquête terrain, données recueillies et Persona
Nom du groupe : COTONWATE
Thématique : TEXTILE, Robot de gestion des stocks en magasin
Groupe 05 : Moya APIA __ Hoang DUONG __ Tanguy DE LANVERSIN
Hypothèses de départ
Dans le cadre de notre projet fil rouge, nous nous sommes intéressées au domaine du textile, en particulier à la traçabilité des vêtements. Ainsi nous avons réalisé un état de l’art qui nous a permis d’élaborer certaines hypothèses que nous avons confirmées ou non pendant nos entretiens. Ces hypothèses sont les suivantes :
- Une transparence complète sur la composition des vêtements peut compromettre les marques et les usines de fabrication.
- L’utilisation de différents types de matériaux lors de la fabrication des vêtements, peut rendre difficile la traçabilité.
- Les informations sur les vêtements peuvent être incompréhensibles pour les consommateurs, à cause des termes techniques et scientifiques.
- Les solutions de traçabilité existantes ne permettre qu’une traçabilité partielle des vêtements.
- Les solutions de traçabilités génèrent des coûts supplémentaires pour les fabriques
- La technologie constitue peut-être la meilleure approche pour répondre à la question de la traçabilité des vêtements.
- Pour un consommateur, connaitre la traçabilité des vêtements, n’est important que lors de l’achat.
- La traçabilité des vêtements ne constitue peut-être pas un problème majeur dans l’industrie du textile.
Partie 1 : Présentation de l’enquête terrain
1. Première vague d’entretiens :
Personnes interrogées :
- Mme. Marine : ex-RH chez Hermès puis chez Inditex
- M. Joël: enseignant IMT Atlantique
- Mme. Ginette: Guide dans les ateliers St James
- Mme. Emilie: responsable d’un rayon montagne et randonnée chez Decathlon
Résumé des entretiens :
Nous avons pu interroger des personnes de tout milieu, évoluant à différents postes dans le cadre de notre enquête terrain . Le premier élément frappant qui en est ressorti est que dans le milieu du luxe (Hermès) ou de l’artisanat (St James), les filières sont déjà très transparentes pour le consommateur, la qualité des produits, des matières premières, les techniques utilisées, leur durabilité, leur longévité, leurs propriétés constituent un argument de vente essentiel dans la stratégie des entreprises. Acheter leur marque doit être gage de qualité pour le consommateur et chaque produit doit lui raconter une histoire particulière pour qu’il ait l’impression d’acheter un produit exclusif, contribuant au changement, à la préservation d’un savoir-faire! Dans ce cas-là, la question de la traçabilité n’a donc pas trouvé de nœud dont on aurait pu tirer le fil jusqu’à une problématique concrète.
Dans le cas de groupe de fast fashion produisant à plus grande échelle nous avons pu déceler de vrais manques quant à la traçabilité de leurs produits. Les étiquettes sont loin d’être exhaustives concernant l’origine des produits (nom de l’usine, atelier, origine des matières premières…) et elles sont souvent écrites en tout petits caractères. De l’avis de M. Joël, les étiquettes devraient comporter “plus de mentions légales obligatoires”. Mme Marine a eu à ce sujet une remarque très critique vis-à-vis d’Inditex, qualifiant Zara et certaines autres marques de “Ouïghour land”, faisant ainsi référence aux scandales liés au travail forcé des Ouïghours en Chine pour certains grands groupes. Ces entretiens n’ont malheureusement pas permis de déceler une vraie volonté de changement de la part de ces groupes, au contraire, il semblerait que le maintien d’un flou concernant l’origine de leurs produits soit plutôt dans leur intérêt.
Conclusion :
Au terme de cette première vague d’entretien, nous avons pu valider deux de nos hypothèses. « une traçabilité totale peut causer des désagréments aux grandes marques et le nombre important d’acteurs impliqués dans fabrications des vêtements empêche de remonter totalement la chaîne de production ». Dès lors, la question de la traçabilité dans l’industrie du textile nous a semblé complexe à traiter, un vrai changement semblant plutôt pouvoir être impulsé aux niveaux politique et législatif. Néanmoins, un autre sujet est venu captiver notre attention au fil des entretiens et notamment en discutant avec des salariés de Décathlon. Il s’agit de : la gestion des stocks des vêtements en magasin. Afin de mieux appréhender ce sujet, nous avons réalisé une seconde vague d’entretiens.
2. Seconde vague d’entretiens :
Personnes interrogées :
- Mme. Rose : Responsable rayon chez décathlon
- Jules : Co-responsable rayon chez décathlon
Résumé des entretiens :
Chez Décathlon, la grande majorité des articles est équipée d’étiquettes RFID permettant ainsi d’inventorier plus facilement le magasin et les entrepôts, afin de lutter contre les vols. Aujourd’hui, les salariés passent dans les rayons et les stocks avec une raquette RFID UHF leur permettant de détecter les articles à plusieurs mètres de distance. Cette tâche de leurs propres aveux est “longue, fastidieuse et inintéressante”. Aussi, cette détection manuelle présente parfois des risques d’enregistrer plusieurs fois un élément dans la base de données. Selon les personnes interrogées, le concept des étiquettes RFID, semble être un bon palliatif au problème de gestion des stocks, cependant il ne traite la question qu’à moitié.
Conclusion :
En creusant le sujet, nous nous sommes rendu compte que cette technique, la RFID, était en plein essor dans l’industrie textile. Étant de plus en plus fiable, moins coûteuse et éprouvée, le nombre de marques l’ayant adopté ne fait que croître. C’est donc en partant de ce constat ainsi que de nos enquêtes que nous avons décidé de changer notre fusil d’épaule et de traiter cette problématique au sein de notre groupe. Nous nous sommes orientés vers une gestion plus intelligente des stocks à l’aide de la RFID.
Partie 2 : Présentation des persona
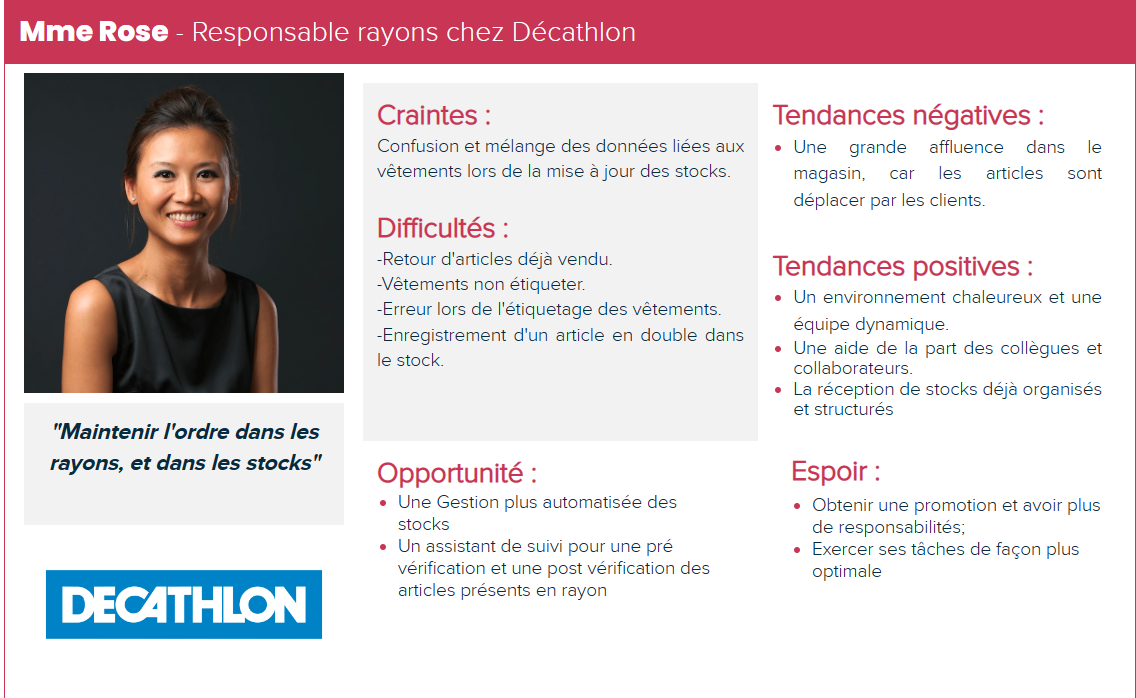 Le but d’un tel employé consiste à maintenir les stocks à jour et en ordre, afin que le suivi des achats et ventes soit plus aisé. Au quotidien, les principales difficultés concernent souvent les vêtements sans étiquettes, car il est difficile de savoir leur état dans la base des stocks, ce qui entraîne d’autres problèmes. Ainsi la principale crainte pour ce personnage, c’est d’être confronté à cette situation. un tel environnement est parfois stressant, surtout lorsqu’il y a une importante affluence dans le magasin. Heureusement, le fait de pouvoir compter sur des collaborateurs dynamiques constitue une source de joie. Disposer d’un assistant automatisé pour la gestion des stock serait une opportunité car cela permettrait de limiter les erreurs, et d’optimiser la gestion des tâches.
Le but d’un tel employé consiste à maintenir les stocks à jour et en ordre, afin que le suivi des achats et ventes soit plus aisé. Au quotidien, les principales difficultés concernent souvent les vêtements sans étiquettes, car il est difficile de savoir leur état dans la base des stocks, ce qui entraîne d’autres problèmes. Ainsi la principale crainte pour ce personnage, c’est d’être confronté à cette situation. un tel environnement est parfois stressant, surtout lorsqu’il y a une importante affluence dans le magasin. Heureusement, le fait de pouvoir compter sur des collaborateurs dynamiques constitue une source de joie. Disposer d’un assistant automatisé pour la gestion des stock serait une opportunité car cela permettrait de limiter les erreurs, et d’optimiser la gestion des tâches.
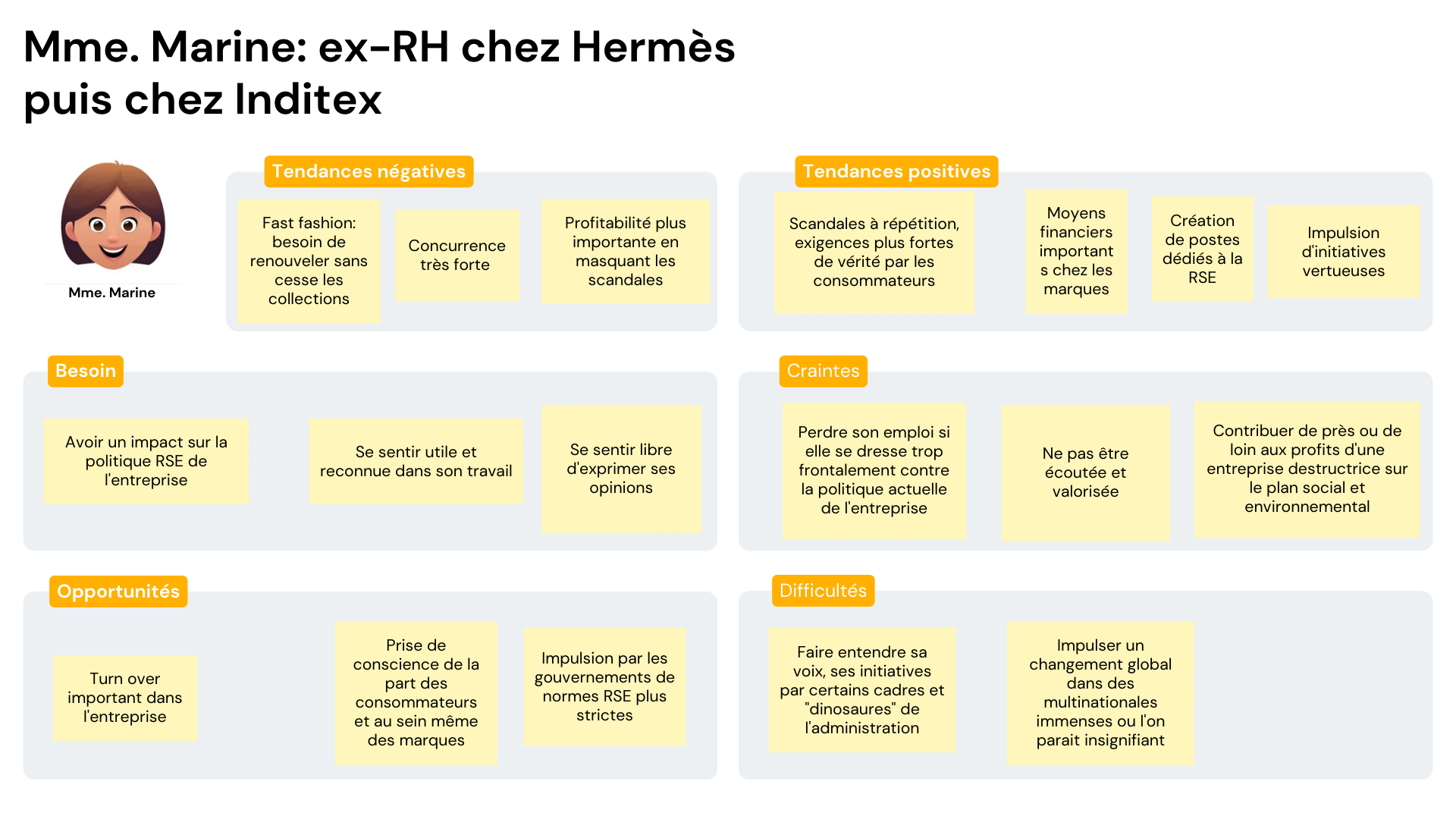 Le cas de Mme Marine était très intéressant à étudier du fait du niveau de détails qu’elle nous a donné sur ses expériences passées et la diversité de ces dernières. En effet, Mme. Marine a vu deux faces bien différentes de l’industrie de la mode. On a tout de suite senti son engagement pour un développement durable de cette industrie et son rejet de la fast fashion irresponsable et destructrice.
Le cas de Mme Marine était très intéressant à étudier du fait du niveau de détails qu’elle nous a donné sur ses expériences passées et la diversité de ces dernières. En effet, Mme. Marine a vu deux faces bien différentes de l’industrie de la mode. On a tout de suite senti son engagement pour un développement durable de cette industrie et son rejet de la fast fashion irresponsable et destructrice.
Nous avons pu sentir que son expérience chez Zara a été une grande désillusion: on lui avait fait miroiter un poste impactant la politique RSE de l’entreprise, une véritable volonté de changer la manière de produire et vendre chez Zara. La réalité s’est avérée être toute autre et de son propre aveu, elle n’a jamais pu faire entendre sa voix au sein de l’entreprise. Chez des entreprises à taille plus humaine, elle a néanmoins pu nous parler de dizaines d’initiatives vertueuses dans l’industrie de la mode tout en restant critique face aux limites de celles-ci et de leur application à grande échelle. Elle cherche donc actuellement un emploi dans une de ces entreprises responsables, où elle pense pouvoir influencer et innover en terme de politique RSE. On sent chez elle un réel espoir de changement dans l’industrie de la mode, changement qui selon elle pourra être insufflé.
Création d’un simulateur de thermomètre, d’hémocue et de glucomètre pour une immersion complète lors des simulation en santé
Équipe Santé! :
Heliote Zaouly, étudiant en deuxième année à IMT Atlantique.
Lucas Genin, étudiant en deuxième année à IMT Atlantique.
M D, étudiant en troisième année à IMT Atlantique.

I) Contexte
Dans le cadre de la thématique d’approfondissement « conception d’objets communicants », les étudiants d’IMT Atlantique doivent proposer une solution innovante pour répondre à un problème. Notre projet est de développer un appareil électronique recouvert d’une coque, capable d’afficher sur son écran, une valeur entrée sur un site web. Le but de ce projet est d’aider les enseignants dans les centres de simulation pour étudiants en Santé à transmettre des données d’appareil de mesure (température, taux d’hémoglobine et taux de glycémie) à un étudiant qui s’entraîne à une distance de quelques mètres.
II) Réalisation
-Une coque imprimée au FABLAB à l’aide de l’imprimante 3D
-Écran LCD TFT HD de 1.8 pouces, 128×160, Port série SPI, Module ST7735, lecteur IC
-Un bouton poussoir
-Une carte Raspberry pi zéro W
-Une batterie lithium-polymère TURNIGY 1000mAh trois cellules de 11.1 v
-Des câbles (fils et câble d’alimentation micro USB)
1) Electronique
a) Raspberry pi zero WH
Le Raspberry Pi Zero WH est une version miniature de la carte Raspberry Pi classique. Ce modèle WH est basé sur un processeur ARM à 1GHz accompagné de 512 Mo de RAM.Il intègre un port GPIO déjà soudé à la carte mère et dispose d’interfaces WiFi et Bluetooth.
Cette version petit format diffère de la version classique des cartes Raspberry Pi (Pi2, Pi3, Pi3B+, etc…) en adoptant un port mini-HDMI nécessitant un cordon adapté ainsi que deux ports micro-USB:
- 1 x port micro-USB pour l’alimentation USB 5 Vcc/1 A .
- 1 x port micro-USB nécessitant un HUB micro-USB vers USB permettant de raccorder différents périphériques (clavier, souris, manette, afficheur tactile, disque dur, etc).
Ce mini-ordinateur fonctionne depuis une carte micro-SD préparée avec une distribution Linux Raspberry Pi OS.
Caractéristiques:
- Alimentation à prévoir: 5 Vcc via adaptateur USB
- Puissance maxi: 180 mA (adaptateur secteur 1 A recommandé en fonction des périphériques raccordés)
- CPU: ARM1176JZF-S ARM11 1 GHz
- GPU: Broadcom VideoCore IV
- WiFi: 2,4 GHz, 802.11n (Broadcom BCM43438)
- Bluetooth 4.1 (Broadcom BCM43438)
- Mémoire: 512 MB LPDDR2 (partagé avec le GPU)
- Interfaces:
– 1 x port micro-USB 2.0
– bus: SPI, I2C, série, I2S
– support pour cartes micro-SD
– sortie audio: mini-HDMI
– sortie vidéo: mini-HDMI
– connecteur mini-CSI - Dimensions: 65 x 31 x 13 mm
- Poids: 12 g

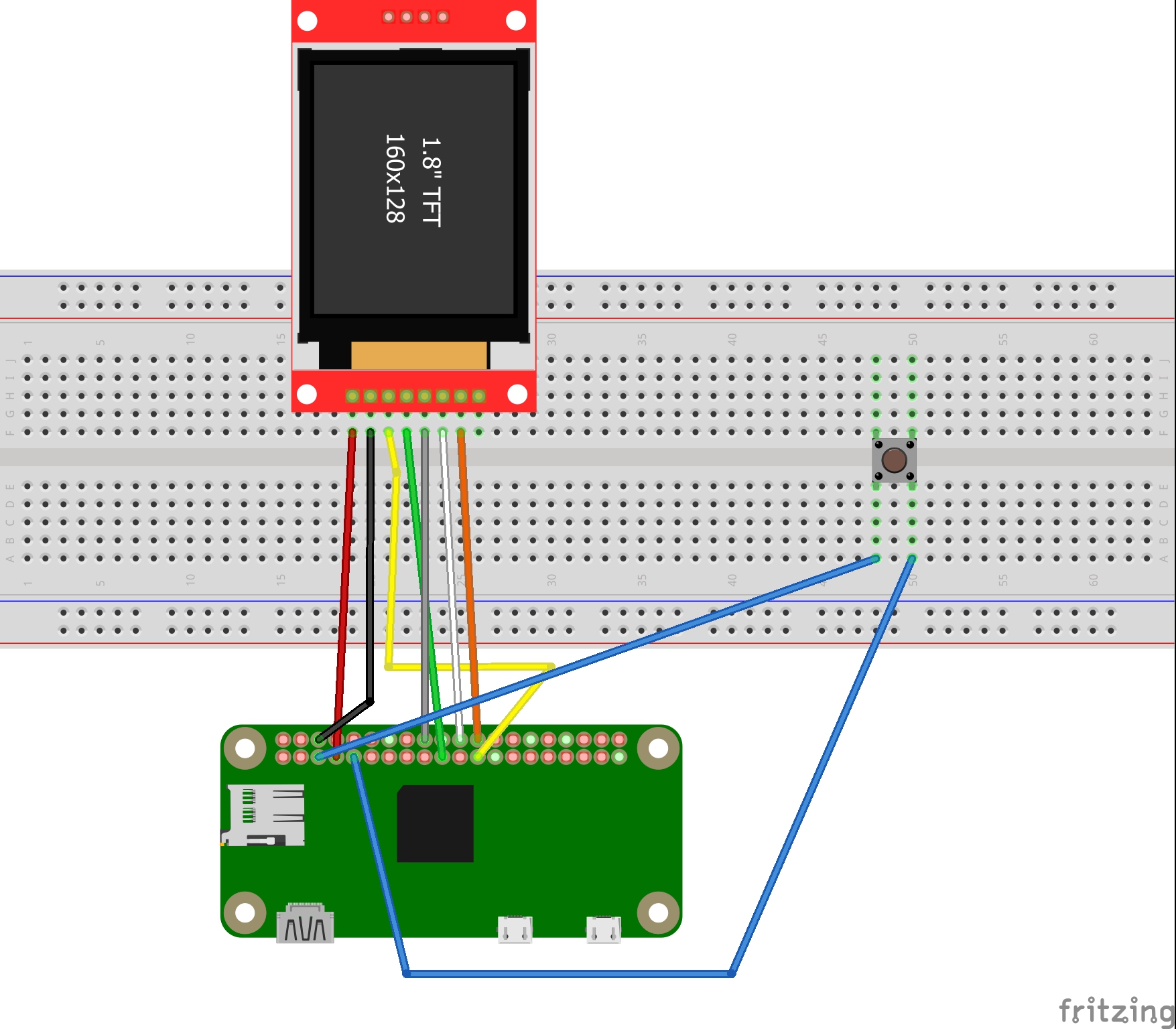
b) Écran LCD TFT HD de 1.8 pouces, 128 x 160
Nous avons utilisé ce module pour l’affichage des données (température, taux d’hémoglobine, taux de glycémie). Il comporte 11 broches, mais seulement 7 de ces broches seront utilisées. Le branchement de ce module aux broches du Raspberry Pi se fait comme représenté ci-dessous :
| Ecran TFT 1.8” | Raspberry Pi zero W GPIO
BOARD |
Raspberry Pi zero W GPIO
BCM |
| VCC | GPIO 4 | PIN 07 |
| GND | GND | PIN 06 |
| SCL | SCLK | PIN 23 |
| SDA | MOSI | PIN 19 |
| RS/DC | GPIO 24 | PIN 18 |
| RES | GPIO 25 | PIN 22 |
| CS | CE0 | PIN 24 |
Pour pouvoir manipuler ce module, nous aurons besoin des bibliothèques python suivantes:
ST7735 et PIL

c) Bouton Poussoir
Ce bouton nous permet de mettre la Raspberry Pi en mode veille et de l’allumer lorsqu’on l’appuie pendant 2 secondes minimum. A cet effet, il est branché comme suit:
Une broche est reliée au GPIO3 (PIN 05) et une autre au niveau du GND (PIN 09).

Pour rendre le bouton d’allumage opérationnel, il faut ouvrir le shell de votre raspberry Pi et exécuter la commande suivante:
sudo nano /boot/config.txt
A la fin de ce fichier, ajoutez ceci : dtoverlay = gpio-shutdown
Une fois cette configuration faite, vous pouvez utiliser votre bouton pour allumer et mettre la Raspberry Pi en veille.
d) Schéma des branchements
2) Code du projet
Comme le projet contient à la fois une application web et un programme pour afficher de l’information sur un écran nous avons choisi de programmer le site web en utilisant le combo HTML+CSS+PHP+JS+MYSQL et concernant l’affichage sur l’écran nous avons décidé de le faire à partir d’un programme python.
Le principe est le suivant:
-Le code python est lancé en arrière-plan et tourne continuellement sur la carte Raspberry Pi et lit le contenu d’un fichier texte en permanence et affiche le contenu de celui-ci.
-Le site web étant hébergé sur la Raspberry Pi transmettra des données au code python à travers le fichier texte. Il se base sur des fichiers json pour afficher un historique de données transmis. Les fichiers json sont le résultat d’une requête exécutée sur une base de données MySQL.
-La base de données est réinitialisée automatiquement à chaque nouveau jour
Le code est présent sur le GitHub ici.
Aussi si vous voulez que le programme se lance au démarrage de la Raspberry Pi, vous pouvez copier ceci dans le fichier /etc/rc.local juste avant la ligne ‘exit 0’:
/usr/bin/python3 /home/pi/Desktop/on_off.py &
/usr/bin/python3 /home/pi/Desktop/affichage.py &
3) Interface Web
Afin de pouvoir échanger des informations avec l’appareil, nous avons créé une application web avec VS Code. Elle est hébergée sur l’appareil. L’application et l’appareil communique par fichier, cependant pour avoir accès à l’application web il faut être dans le même réseau WIFI que l’appareil.
Une fois dans le même réseau WIFI que l’appareil, il suffit d’ouvrir un navigateur et d’entrer l’adresse IP de l’appareil. Après cela, on se retrouvera sur la page de connexion du site web.

Après s’être connecté (par défaut entrez “root” et “root” comme identifiants de connexion), vous serez redirigé vers une page d’accueil. A partir de cette page vous pouvez envoyer des données de température, d’hémoglobine et de glycémie.

Il y a aussi les pages Aide et À propos où trouve nos informations.

N’ayant pas eu assez de temps, nous n’avons pas pu bien rédiger le contenu de ces pages et nous n’avons pu donner la possibilité de changer le mot de passe directement sur la page web.
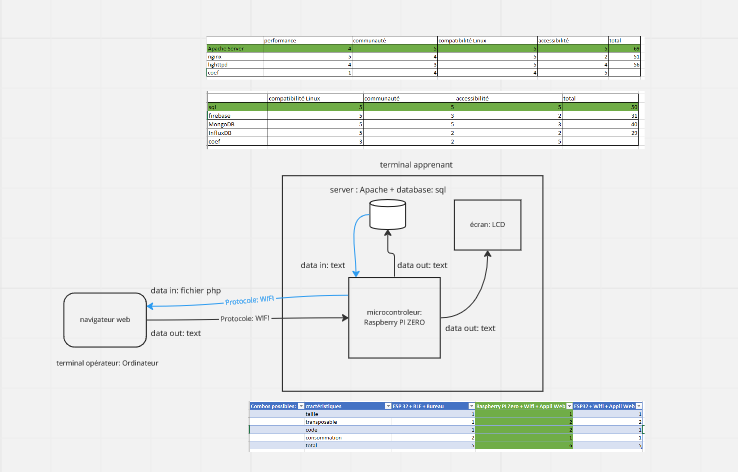
4) Protocole de communication et architecture
Grâce à la technologie WIFI, l’opérateur pourra accéder au site web hébergé sur le produit et transmettre des données pour que celles-ci soient affichées. Pour ce faire, il devra se connecter au même réseau WIFI de l’objet, ouvrir un navigateur web et écrire l’adresse IP de l’appareil.
La communication entre le code python et le site web se fait par un fichier texte. En effet, lorsqu’on souhaite envoyer une donnée à l’objet, le site web écrit une information dans un fichier texte. Toutes les informations suivent le format suivant : ” données type ».
Les champs ‘type’ et ‘données’ varient selon le type de donnée envoyée. Par exemple, si on transmet “37.5 T” cela signifie qu’on voudrait afficher une température (T) de 37.5 degrés Celsius.
L’objet, de son côté, lit le contenu du même fichier et affiche la donnée sur l’écran.
L’architecture de fonctionnement est le suivant:
5) Coque
L’appareil est recouvert d’une coque faite en deux morceaux qui se glissent l’un dans l’autre. Les modèles de la coque ont été réalisés sur le logiciel SOLIDWORKS puis imprimés à l’aide d’une imprimante 3D Ultimaker 2 présente au fablab.

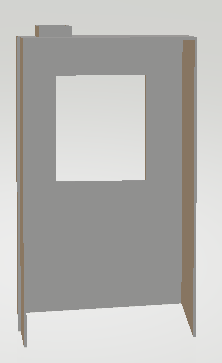
Après une première production de coque, nous avons réduit sa taille et nous y avons ajouté des creux pour le passage du câble d’alimentation par le bas et le passage des fils du bouton au-dessus. Nous avons également ajouté le système de fermeture.
La couleur de la coque correspond à celles disponibles au moment de l’impression au fablab.
III) Résultats
Notre projet se termine par la réalisation d’un appareil électronique placé dans un boîtier, saisissable d’une main, capable d’afficher les valeurs entrées sur un site web ouvert sur un ordinateur à quelques mètres.
Par rapport aux critères de fonctionnement, le système développé a pour défaut que la coque semble manquer légèrement de solidité par sa finesse, et que le circuit à l’intérieur de la coque impose une pression sur les parois qui peut l’abimer sur le long terme. La coque pourrait avoir un creux plus grand pour le passage des fils du bouton afin que ce dernier reste collé à la paroi sans que ses fils sortent.
Finalement, il semble que le projet puisse être amélioré par l’optimisation des dimensions de la coque et par l’ajout de la possibilité pour l’utilisateur de modifier le mot de passe pour se connecter au site web.
