
CoocPen – Interactions lors des cours particuliers à distance – enquête terrain et données recueillies
Dans cet article, nous présentons le déroulement de notre enquête terrain ainsi que les informations recueillies lors de chaque entretien. La liste de toutes les personnes contactées est présente en fin d’article.
Déroulement de la recherche sur le terrain
Comme prévu dans la méthodologie de recherche d’hypothèses, nous avons ciblé des professeurs et élèves de cours particuliers. Tout d’abord, nous nous sommes orientés vers les étudiants d’IMT Atlantique donnant des cours particuliers. Suite à l’état de l’art, nous avons contacté des professeurs tenant des sites internet de cours particulier en ligne ainsi que des professeurs donnant des cours chez SuperProf ou Acadomia (nous les avons trouvé grâce à LInkedIn ou LeBonCoin). Enfin, suite aux conseils de nos professeurs nous avons contacté des professeurs sur la plateforme Sésamath, nous nous sommes aussi entretenu avec des élèves de première année à IMT Atlantique ayant reçu des cours de mathématiques à distance, puis nous avons contacté un bénévole d’un centre social pour le soutien scolaire qui a été contraint de passer en distanciel durant le premier confinement. En plus de ces entretiens, nous avons découvert durant notre recherche documentaire que certaines plateformes de cours à distance retransmettaient en vidéo un exemple du déroulement d’un cours, nous nous en sommes servi en tant qu’observation.
Observation de deux cours à distance
Les créateurs des plateformes de cours à distance https://alive.acadomia.fr/ et https://visio-formation.fr/ proposent des immersions dans des cours en ligne. Voici nos observations :
- Le professeur écrit sur un tableau virtuel mais il est le seul à pouvoir écrire.
- Il utilise un autre logiciel (Geogebra) pour les figures. Il est encore une fois le seul à pouvoir modifier les figures.
- Les cours particuliers ne se font pas tout seul mais par groupe de 3 ou 4 élèves sur le site Acadomia pour favoriser l’interaction.
- Lorsque les élèves doivent écrire, ils doivent utiliser le chat pour noter leur réponse ou l’écrire sur le cahier puis le montrer à la caméra.
- Parfois les élèves peuvent avoir la bonne réponse mais issue d’un mauvais raisonnement, le professeur ne voit pas ceci immédiatement à distance.
Étudiants d’IMT Atlantique donnant des cours particuliers
Nous avons interrogé 5 étudiants d’IMT Atlantique qui ont donné des cours particuliers en présentiel et en ligne. Voici ce que nous avons trouvé intéressant dans ces entretiens :
- Le problème du déplacement lors des cours particuliers en présentiel est souvent revenu. Un étudiant nous a confié avoir du mal à gérer sont temps entre ses études, sa vie privée et les cours particuliers.
- Un étudiant a indiqué que, si le déplacement était trop long, il dispensait son cours via zoom.
- Pour certains, ils n’ont pas utilisé de logiciel particuliers pour donner des cours à distance à part skype ou zoom.
- Ceux qui ont tenté d’utiliser un logiciel ont témoigné de la difficulté d’utiliser ceux-ci pour desiner des schémas ou des graphiques. Le logiciel utilisé par l’un d’entre eux est Google Doc, ceci est intéressant car ce qu’il cherchait était un logiciel sur lequel lui et l’élève pouvaient écrire simultanément. Un autre utilisait Geogebra et mathtype car il voulait bien montrer les graphiques et les équations.
- Un étudiant a acheté une tablette spécialement pour donner les cours particuliers en ligne.
- Une étudiante donnaient aussi des cours de français et d’anglais en plus des cours de mathématiques. Elle a affirmé n’avoir aucun problème pour donner des cours en français et en anglais mais que c’était plus compliqué pour les mathématiques.
Professeurs de Sésamath
Les professeurs de Sésamath sont des professeurs de mathématiques enseignant le plus souvent au collège et au lycée et développant des outils pour enseigner les mathématiques. Les informations retenues sont les suivantes :
- Le passage des cours en distanciel a été mauvais pour la majorité des élèves.
- Les élèves qui avaient l’habitude de poser des questions en classe sont frustrés, perdent en motivation et progressent moins vite.
- Il est beaucoup plus facile de voir en classe si tous les élèves suivent.
- Les professeurs n’ont pas de problème pour utiliser les outils d’enseignement pour présenter les cours ou les exercices. Ils ont dû changer les exercices donnés aux élèves pour être sûr qu’ils comprennent et pour qu’ils soient liés aux outils en ligne.
- Il n’ont pas utilisé d’outil sur lequel les élèves et les professeurs peuvent écrire simultanément.
- Rien ne remplacera jamais un cours en présentiel.
Élèves de FISE 1A
Il était important dans cette enquête terrain d’avoir des témoignanges d’élèves. Nous avons donc interrogé une élève de FISE 1A qui a reçu des cours de maths à distance durant le mois de septembre 2020.
- Seuls les cours étaient à distance donc l’élève pouvait suivre le cours sans y participer, ils pouvaient poser des questions à l’oral ou dans le tchat.
- Toujours les mêmes élèves qui posent des questions dans le tchat.
- Difficultés à se concentrer par rapport à un cours en présentiel
- La professeure utilise un tableau virtuel pour démontrer des théorèmes, cela est plus facile à comprendre mais difficile à suivre si l’élève ne note pas (elle n’a souvent pas le temps de noter).
- La professeure faisait des schémas sans problème pour expliquer certaines parties du cours.
- Seul la professeure dessinait, les élèves ne pouvaient pas participer.
Entretien avec un bénévole de soutien scolaire dans un centre social
Sur conseil de nos professeurs, nous nous sommes entretenus avec un bénévole pratiquant le soutien scolaire dans un centre social. Ce dernier a été contraint de dispenser des cours en distanciel durant le premier confinement. Voici les informations intéressantes que nous avons pu tirer de cet entretien :
- Il s’attendait à ce que les élèves soient moins concentrés lors des cours à distance. En effet ce sont des enfants qui habitent dans des appartements en ville et qui ont des frères et sœurs. Cependant c’était le contraire, l’écran semble intéresser les élèves et ils étaient concentrés durant toute la durée du cours (45 minutes).
- Difficultés d’utilisation des outils pour les cours à distance à la fois pour les élèves que pour les professeurs (la plupart des bénévoles dans le centre social étant des personnes retraitées, certains élèves n’avaient pas d’ordinateurs).
- Les élèves envoyaient leurs devoirs par mail avant le cours. Pour les cours d’Anglais, d’Histoire-Géo ou Français il n’y avait pas trop de problèmes mais pour les matières scientifiques “ce n’était pas pratique”.
Conclusion
A partir des entretiens, nous pouvons valider l’hypothèse “ le niveau d’interaction permis par le distanciel n’est pas aujourd’hui à la hauteur de celui d’un cours “en physique”, en particulier dans le cadre de cours scientifiques.“ car nous avons observé une difficulté d’enseigner les matières scientifiques à distance, surtout lorsque les deux parties essayent d’écrire des formules, ou de dessiner des schémas et des graphes. De même, nous pouvons valider l’hypothèse que dans les matières scientifiques, les gens choisissent un cours en présentiel car ils n’ont pas les outils nécessaires pour avoir un cours en distanciel de la même qualité. Les étudiants ont tous levé le problème du déplacement lors des cours particuliers donc nous pouvons conclure que notre hypothèse “les gens ne sont pas réfractaires à des cours en particulier à distance, si la qualité d’un cours en distanciel peut être conservée.” cependant lorsqu’il y a plusieurs élèves les professeurs préférerons toujours un cours en présentiel pour prendre en compte tous les élèves. De plus, nous confirmons que notre problème porte essentiellement sur les cours particuliers dans les matières scientifiques car il n’y a pas tant de problème dans les autres matières pour lesquelles les cours particuliers à distance semblent être d’une qualité suffisante.
Liste des personnes contactées
Etudiants : N-D, Rachida, M-B, Z-K
Professeurs de Sésamath : J-M, B-M
élève de Fise 1A : M-N
Bénévole de soutien scolaire : P-R
Liste des personnes contactées mais qui n’ont pas donné suite
Professeurs sur Acadomia et superprof : A-F, T-S, C-R, C-A
Créateur du site “Cours de maths par skype” : E-F
Création de supports pédagogiques : Baseball Multicolore/Crêpier Psychorigide
Dans le cadre de formations autour de l’informatique débranchée, nous avons utilisé la découpe laser pour créer les supports de jeu du Baseball Multicolore et du crêpier psychorigide en s’inspirant des supports de jeu conçus par le groupe Sciences Manuelles du Numérique/ Computer Science In Real Life (https://github.com/InfoSansOrdi/).

Pour en savoir plus sur le jeu:
https://members.loria.fr/MDuflot/files/med/baseball.html
- Vous trouverez le fichier de la découpe laser ICI. Les motifs permettent aux personnes daltoniennes de pouvoir distinguer les bases.
- N’hésitez pas à l’améliorer!
réCup – Méthodologie de l’étude terrain
GROUPE : Vincent GUILLON – Raphael VOYER – Arthur PILETTE – Pierre DUGAST
I. Organisation générale du groupe
L’étude terrain est la partie cruciale du projet. C’est à partir des informations collectées lors de cette étude que l’ensemble du projet est construit. Il est donc nécessaire d’adopter une méthodologie rigoureuse afin de réaliser cette phase dans les meilleures conditions et garantir la réussite du projet. Nous avons ainsi décidé de scinder notre groupe de quatre en sous-groupe de deux membres :
- Le premier sous-groupe est chargé des recherches inhérentes à l’état de l’art inhérentes
- Le second sous-groupe est focalisé sur l’étude terrain
1. Tâches nécessaires à la préparation de l’étude terrain
Le second sous-groupe a donc plusieurs tâches à sa charge. Il doit d’abord établir les types de personnes appelés « personas » dont l’interview est pertinente dans la phase de collecte des informations.
Une fois les personas définies le sous-groupe doit rechercher des contacts correspondants à chacun des profils recherchés. Afin d’augmenter sensiblement les chances de détection de problèmes généralisés et éviter de se baser sur des problèmes personnels, il faudrait que le nombre total de personnes interviewés soit de 10.
Le second sous-groupe a aussi pour mission de s’occuper de la gestion des interviews. Par conséquent, les membres doivent contactés les personnes recherchées et planifier les entretiens dans le temps. La difficulté de cette tâche est que la prise de contact de l’ensemble des personnes à interroger se fait en même temps. Les dates d’entretien proposées aux contacts sont donc les mêmes et il est possible que les dates proposées par les contacts soient programmées au même moment créant ainsi des conflits d’organisation. Afin de limiter l’impact de ce problème le groupe doit avoir une méthodologie de gestion minutieuse impliquant :
- Une planification des entretiens dans le temps irréprochable
- Faire un suivi auprès des contacts en leur indiquant les éventuels changements de date
Le sous-groupe doit préparer en parallèle les questions à poser en prenant soin de les adapter aux personnes interviewées. En effet, des questions non-adaptées peuvent induire une réponse inadéquate ou l’impossibilité de répondre et ainsi installer une gêne lors de l’entretien et donc fausser les résultats obtenus suite à la collecte d’information.
Une fois les entretiens terminés il est nécessaire de réadapter les éléments de l’étude cités précédemment. Le planning doit être mis à jour régulièrement en renseignant les entretiens qui ont été réalisés et ceux à venir. Il est pour finir nécessaire de réadapter les questions posées précédemment en fonction des hypothèses faites suite à la collecte d’information et ainsi de creuser les sujets jugés porteurs.
2. Organisation lors des entretiens
Afin que l’ensemble du groupe puisse monter en compétence dans la façon de guider un entretien nous avons décidé d’intégrer l’ensemble des membres du groupe aux entretiens. Ainsi les membres du groupe n’ayant pas préparé les questions pourront dans un premier temps observer l’entretien et ainsi comprendre la technique de conduite d’un entretien et l’intérêt de la formulation des questions posées. Après quelques entretiens les membres du premier sous-groupe pourront ainsi réaliser l’entretien afin de forger leur expérience dans ce domaine.
Afin de ne pas omettre d’informations à cause d’une mauvaise écoute où une mauvaise restitution de l’entretien, il est nécessaire d’adopter une méthodologie efficace. L’un des membres est chargé de poser les questions pendant que les autres retranscrivent les réponses. Afin que tout le monde puisse s’essayer à chacun des rôles, les rôles sont inversés toutes les trois questions. Avec un tel fonctionnement nous voulons aussi éviter qu’une seule personne pose les questions. Cela peut générer un sentiment de malaise chez la personne interviewés qui doit être à tout prix éviter car la personne peut se refermer et ne pas nous livrer l’ensemble des informations. Juste avant de terminer l’entretien, les membres reformulent ce qui a été indiqué afin de vérifier qu’il n’y a pas eu de mauvaise interprétation.
II. PERSONNES INTERVIEWEES
Comme indiqué précédemment, le second sous-groupe établit une liste de personne à interroger en fonction des types de personnes qui ont été définis. Le rôle de chacun de ces types de personne sera explicité dans cette partie et leur valeur ajoutée dans le cadre de l’étude terrain sera justifiée.
1. Responsables handicap (associations + écoles)
Les responsables handicap sont les personnes chargées du suivi des personnes atteintes de handicap, ils sont donc au plus proche de leurs problèmes quotidiens. Ils peuvent être présent dans le milieu scolaire ou social afin de favoriser leur insertion. L’IMT comprend des responsables handicap, il sera donc beaucoup plus aisé de leur expliquer le motif de notre entretien et d’obtenir un entretien rapidement.
Les informations collectées lors d’un entretien avec un responsable au sein d’une école est plus axée sur une tranche d’âge jeune alors qu’un responsable au niveau social touchera une tranche d’âge plus vaste. Ainsi nous pourrons obtenir des informations sur un large panel de types de personnes mais aussi de focaliser nos questions si nécessaires sur une tranche d’âge plus jeune.
Les responsables handicap pourront aussi nous transmettre les contacts des personnes atteintes de handicap avec lesquelles elles sont en contact avec leur accord préalable.
2. Famille ou proche des personnes atteintes d’un handicap de surdité
Nous avons aussi décidé d’ajouter à la liste les familles des personnes atteintes de surdité car elles ont connaissance de problèmes plus intimes qui n’ont pas été communiqués aux responsables. Ils participent quotidiennement à l’accompagnement de notre population cible et pourront donc nous indiquer avec beaucoup plus de précision les problèmes réguliers et/ou impactant.
En questionnant les frères/ sœurs et parents des personnes concernées nous obtiendront un large panel d’information concernant leur interaction sociale, les objets qu’ils utilisent quotidiennement etc.
3. Personnes atteintes d’un handicap de surdité
Bien entendu nous allons aussi interviewer nos utilisateurs cibles car ce sont eux qui sont le plus à même de répondre à l’expression de leur besoin et des douleurs qu’ils rencontrent.
Ces contacts sont cependant difficiles à obtenir car ils ne peuvent nous être transmis que via les responsables handicap ou familles.
III. TECHNIQUES D’ENTRETIEN UTILISEES
1. Entretien semi-directif
L’entretien semi-directif est un type d’entretien qualitatif très souvent utilisé dans les recherches en sciences humaines et sociales. Il permet d’orienter le discours des personnes interrogées autour de thèmes définis par les enquêteurs. Un tel type d’entretien permet d’éviter toute part de subjectivité de l’enquêteur dans le déroulement de l’entretien et ainsi de centrer son intérêt autour du point de vue de la personne interrogée.
Dans le contexte de notre projet nous avons formulé une hypothèse indiquant que les personnes atteintes de troubles auditifs rencontrent des problèmes d’interaction avec les moyens de communications à distance. Les questions ne seront volontairement pas orientées sur cette hypothèse afin que la personne interrogée nous indique les problèmes rencontrés de manière spontanée. Ainsi à la fin de l’entretien nous pourrons :
- Vérifier que l’hypothèse initiale est valide et évaluer l’impact du problème rencontré mentionnée dans l’hypothèse sur la personne interrogée
- Prendre connaissance d’autres problèmes liés au domaine
Pour ces raisons, l’entretien semi-directif semble être tout indiqué pour notre projet.
2. Observation et immersion
La réalisation d’un entretien qualitatif implique aussi de prêter attention au comportement et à la gestuelle des individus étudiés. Il est intéressant de voir comment les gens s’expriment de manière non-verbale dans certaines situations et ainsi obtenir des informations complémentaires comme la douleur générée par le problème qu’elle mentionne oralement.
L’observation de la personne interrogée permet aussi de sonder les sentiments de la personne interviewée induits par les questions (gêne, joie, tristesse…) et d’adapter notre entretien en conséquence.
La technique de l’immersion dans laquelle les enquêteurs sont empathiques avec la personne interrogée peut aussi se révéler fructueuse et la mettant en confiance.
3. Etablissement d’un climat de confiance
Un des enjeux majeurs de cet entretien est aussi d’établir un climat de confiance en adoptant une bonne posture afin d’éviter tout malaise. Pour ceci, il faut être totalement transparent sur notre identité et les finalités de cet entretien ainsi qu’indiquer qu’il n’y a pas de bonne ou de mauvaises réponses.
Comme expliqué précédemment nous allons aussi faire en sortir que tous les membres du groupe puissent poser des questions afin de ne pas donner la sensation à la personne interrogée que les autres personnes du groupe retranscrivent chacune de ses paroles.
CoOCPen – Interactions lors des cours particuliers à distance – recherche et état de l’art du problème choisi
Auteurs : Herman Corentin,Bonnemains Sean & Benslimane Hazim
Recherche et état de l’art du problème choisi
Dans le cadre de notre projet fil rouge de la TAF CoOC ( Conception d’Objets Communicants) nous devons réaliser le prototype d’un objet communicant répondant à un besoin utilisateur. Le thème que nous allons aborder est celui des cours particuliers : un marché bouleversé par le confinement et qui a changé de forme passant d’un enseignement en présentiel à un enseignement à distance. Ce passage du réel au virtuel a entraîné des changements dans la manière d’expliquer des notions scientifiques et nous pensons que cela rend plus difficile la compréhension de celles-ci par les élèves. Nous avons ainsi réalisé un état de l’art du problème. Nous allons ici vous présenter un résumé de nos recherches sur ce sujet. Nous allons dans un premier temps expliquer les termes de cours particuliers et de cours à distance en ciblant les avantages et les inconvénients de ceux-ci. Ensuite, nous expliquerons l’impact du confinement sur les cours particuliers. Enfin, nous présenterons quelques solutions présentes pour effectuer des cours particuliers à distance.
Les cours particuliers
Avant toutes choses, il nous faut définir la notion de cours particuliers. Dans son rapport pour le Haut Conseil de l’évaluation de l’école datant de 2004, Dominique Glasman la définissait comme “des cours donnés à titre payant, en dehors des heures scolaires, dans les disciplines académiques que les élèves apprennent à l’école”. Ils sont dispensés “par des prestataires qui peuvent être des enseignants ou des étudiants, le faisant à titre individuel ou dans le cadre d’une structure commerciale qui les salarie ou les met en relation avec les client” et se délivrent sous forme individuelle, au domicile de l’élève ou du prestataire [… et parfois en] petits groupes de cinq ou six élèves” [7]. Cette définition datant d’avant les évolutions numériques, on peut lui rajouter la possibilité de s’exercer individuellement ou en petits groupes à distance à l’aide d’un ordinateur et d’une webcam par exemple : en effet, sur son blog, la société Superprof qui propose des cours particuliers précise que les cours particuliers à distance peuvent s’exercer en utilisant des logiciels de partage tels que Skype, Google Docs, WhatsApp. [8]
Le recours aux cours particuliers, s’il est mondial, n’est pas le même dans tous les pays : il est très important en Asie de l’Est (Japon, Corée du Sud, Chine) – où s’est développé ce concept sous la dénomination de shadow education – ainsi qu’en Europe de l’Est mais bien moindre au Royaume Uni ou aux Etats Unis par exemple. [9]
En France la pratique des cours particuliers est très importante. Elle est exercée de façon déclarée, en passant par des entreprises telles qu’Acadomia, Complétude, Superprof, etc… qui facilitent la relation entre élèves et professeurs, mais une grande de ces cours sont effectués de manière non déclarée car les professeurs de cours particuliers sont majoritairement des étudiants. En France, la partie déclarée des cours particuliers représente un marché de plus de 2 milliards d’euros et 43% des parents ayant des enfants entre 10 et 16 ans font appel à des cours particuliers. [1] Il est difficile d’obtenir des statistiques précises sur la répartition du nombre de cours par matières dispensées, ces données n’étant pas rendus publiques par les entreprises précédemment citées : au moment où nous écrivons cet état de l’art, nos demandes de données auprès de ces acteurs sont restées sans réponses. Seules des données sur Acadomia ont pu être trouvées mais portent sur la fin des années 90 et sont à relativiser compte tenu de l’évolution digitale du secteur depuis. Elles indiquent que 50% des cours privés dispensés étaient des cours de sciences. [10] Cependant une étude réalisée en 2011 montre que sur les élèves ayant recours au soutien scolaire, 68.7% suivaient des cours de Mathématiques, 6.7% de Physique Chimie et respectivement 26.6% et 23.8% pour le français et la LV1. Par ailleurs, d’après une étude de PISA, en 2012, presque 40% des élèves français de 15 ans suivaient au moins un cours d’une heure de mathématiques en dehors de l’école. [9] Ces chiffres confirment le nombre important de cours scientifiques parmi les cours particuliers dispensés, comme cela est avancé sur les sites des différentes plateformes évoquées plus haut.
La pratique des cours particuliers entraîne par ailleurs des problématiques d’inégalités conséquentes. En effet, les enfants ayant recours à des cours particuliers sont plus souvent issus de familles dont le revenu par habitant est plus important. Par exemple, en Angleterre seuls 9% des enfants issus des familles les plus pauvres ont accès à des cours particuliers contre plus de 20% dans les familles les plus riches. [2]
Le confinement a d’abord eu un impact négatif sur les cours particuliers. En effet, la première semaine après le confinement, deux tiers des cours particuliers ont été annulés, le dernier tiers étant passé à des cours particuliers en ligne.[3]
Les cours à distance
Les cours de type CNED
Le CNED (Centre National d’études à distance) est un établissement public administratif national placé sous la tutelle de l’éducation nationale qui dispense des formations à distance complètes pour tout âge. Les formations proposées par le CNED sont destinées aux élèves des niveaux élémentaires, collège et lycée scolarisés par leur famille (53% des formations vendues en 2018) mais elles permettent aussi de préparer des concours ou des diplômes à distance (47% d’étudiants et d’adultes en 2018). Le CNED propose des cours sur des outils adaptés (classe virtuel, wiki) avec un suivi individualisé : des tuteurs, des correcteurs et des enseignants sont présents pour suivre les élèves. Une assistance pédagogique est aussi disponible. En 2018, le CNED a vendu 213 000 formations. [12]
Les cours de type MOOC
Les MOOCs (Massive Open Online Course) sont des cours, payants ou non, dispensés entièrement en ligne à travers des organismes universitaires et d’éducation supérieure (comme Harvard ou l’Institut Mines-Telecom) ou sur des plateformes dédiées comme OpenClassroom, Coursera ou bien Udemy. Ils portent sur tous types de contenus, allant du scolaire au développement personnel par exemple. Leur format diffère d’un cours en ligne classique car les élèves et le professeur n’interagissent pas en direct : ce sont des cours sous format écrit ou vidéos, parfois accompagnés d’exercices à effectuer, qui sont en accès libre depuis un ordinateur et que les étudiants peuvent travailler quand ils le souhaitent. Ce manque d’encadrement est par ailleurs décrié, car si l’ont obtient bien une certification à la fin du MOOC, une étude réalisée par le MIT et Harvard montre que seulement 5% des inscrits vont au bout de la formation. [11]
Les cours sur YouTube
De nombreux enseignants ont décidé de créer des chaînes YouTube afin de dispenser des cours accessibles gratuitement par tous. Ils se prennent en vidéo en train de donner des leçons sur des notions importantes du cours ou corrigent des exercices. En France, dans le domaine des sciences, on peut par exemple citer Yvan Monka qui donne des cours de Mathématiques niveau collège et lycée ou E-Learning Physique qui donne des cours de Physique niveau prépa.
Les cours particuliers à distance
Les cours particuliers à distance permettent de dispenser des cours particuliers grâce aux services de téléconférence comme Zoom ou Skype. Cela permet aux professeurs et étudiants donnant des cours à distance de ne pas se déplacer et donc de gagner du temps et de l’efficacité. La différence avec les autres types de cours à distance est que les cours et les suivis sont individualisés. Les cours ne se déroulent qu’entre un seul élève et un professeur à une heure précise souvent une fois par semaine. Cela permet à l’étudiant de consolider des notions vues en classe. [13]
Ensuite, les cours à distance étaient réservés aux personnes isolées ou en situation de handicap avant la période de confinement. Avec le confinement, cette pratique s’est répandue à l’ensemble des élèves dans les collèges, lycées et universités du monde entier. La proportion de cours particuliers à distance a elle aussi grandement augmenté. Chez Superprof l’année dernière 20% des cours particuliers s’effectuaient à distance contre 80% cette année. [1] Les matières enseignées dans ces cours à distance étaient majoritairement des cours de langues, mais on retrouve aussi des matières scientifiques (les mathématiques étant la matière la plus demandée pour des cours particuliers) cependant les cours dans les matières scientifiques s’adaptent mal aux cours à distance. En effet, peu d’outils existent pour ces matières et l’élève risque de perdre du temps. [4]
Les cours particuliers à distance ont bien sûr des avantages et des inconvénients. Selon le créateur du site visio-formation.fr ils ont 4 avantages principaux :
- Ils ne nécessitent aucun déplacement. Ceci est bénéfique pour les nombreux étudiants donnant des cours particuliers et qui n’ont pas de voiture.
- Ils sont efficaces. Le fait d’être devant un ordinateur suscite l’intérêt de l’élève qui est concentré pendant tout le cours et qui gagne donc en efficacité.
- L’accessibilité est un avantage important. Les élèves isolés ou en situation de handicap peuvent plus facilement suivre les cours.
- La flexibilité des horaires : l’élève et le professeur étant chez eux, il est plus facile de trouver une plage horaire convenant aux deux parties. [5]
Ils présentent aussi des inconvénients, notamment dans l’interaction et la communication entre le professeur et l’élève. 80 % de la communication passe par les gestes et ceux-ci sont moins si ce n’est pas du tout visibles à distance. [4]
Compte-tenu de la faible qualité des cours à distance proposés par les écoles durant le confinement, on observe une augmentation dans la demande des cours particuliers lors de la rentrée scolaire : la plateforme internet Superprof enregistre 30% d’inscription en plus par rapport à l’année dernière. [1]
Des solutions pour enseigner les matières scientifiques existent, nous en avons ici listé deux :
- Dans la première, le professeur utilise l’outil de communication Skype pour appeler un élève et il partage son écran. Sur son écran, il utilise un tableau virtuel sur lequel à l’aide d’un stylet seul lui peut écrire. Il s’en sert pour expliquer certaines notions ou pour écrire à la place de l’élève. L’élève utilise sa voix pour lui dire quoi écrire. Selon le professeur, les cours particuliers en visio conférence sont plus efficaces que les cours en présentiel car c’est un gain de temps conséquent et l’élève reste concentré pendant tout le cours. [5]
- La seconde solution a été mise en place par Acadomia durant le confinement. La solution est à peu près la même qu’avec les cours sur Skype avec un tableau virtuel sur lequel seul le professeur peut écrire. Cependant pour favoriser l’interaction, les cours se font en groupe de 3 ou 4 élèves. Il y a aussi mise en place d’un chat ou d’un quiz en ligne pour rendre le cours plus interactif. Les élèves écrivent parfois sur du papier et montrent leur résultat à la caméra. [6]
Conclusion
Pour conclure, nous avons vu que la demande pour les cours particuliers à distance a grandement augmenté durant le premier confinement. Pour les cours dans les matières non-scientifiques, le changement a pu se faire facilement grâce à des outils de communications comme Zoom ou Skype. Cependant, pour les matières scientifiques, les professeurs particuliers ont dû trouver différents moyens pour dispenser ces cours (grâce à des tableaux virtuels, des caméras au dessus des cahiers, des cours particuliers en groupe pour favoriser l’interaction par exemple), qui ne garantissent pas toujours une interaction suffisante pour les élèves notamment. On peut donc conclure que les cours particuliers dans les matières scientifiques sont pour l’instant compliqués à dispenser à distance car il y a des problèmes d’interactions entre l’élève et le professeur, ce qui influe négativement sur la compréhension du cours.
[1] RMC, « Rentrée scolaire: la demande des cours particuliers explose », RMC. https://rmc.bfmtv.com/emission/rentree-scolaire-la-demande-des-cours-particuliers-explose-1968273.html (consulté le oct. 05, 2020)
[2] Blundell, M. C. Dias, R. Joyce, et X. Xu, « COVID-19 and Inequalities* », Fiscal Studies, vol. 41, no 2, p. 291‑319, 2020, doi: 10.1111/1475-5890.12232.
[3] Cullinane et R. Montacute, « COVID-19 and Social Mobility Impact Brief #1: School Shutdown », p. 11, 2020.
[4] « Que valent les cours particuliers en ligne vs à domicile ? », Blog MyMentor. https://www.mymentor.fr/blog/que-valent-les-cours-particuliers-en-ligne-vs-a-domicile (consulté le sept. 30, 2020).
[5] « Cours de maths par Skype – Soutien en ligne : Les 4 avantages. », formation à distance. https://visio-formation.fr/ (consulté le oct. 05, 2020).
[6] « A.LIVE by Acadomia, cours à distance avec un professeur en ligne ». https://alive.acadomia.fr/#slide4 (consulté le oct. 05, 2020).
[7] Dominique Glasman, Le travail des élèves pour l’école en dehors de l’école. Rapport rédigé a la demande du Haut Conseil de l’évaluation de l’école en France, n° 15, décembre 2004.
[8] “Les astuces pour dispenser des cours à distance”, https://www.superprof.fr/blog/etre-prof-particulier-de-chez-soi/ (consulté le 5 Novembre 2020)
[9] Galinié, A. & A. Heim, (2016). Inégalités scolaires : quels rôles jouent les cours privés ?. Contribution au rapport du Cnesco Les inégalités scolaires d’origines sociales et ethnoculturelle. Paris. Cnesco.
[10]“ACADOMIA, Inscription au Marché Libre de la Bourse de Paris”, Commission des Opérations de la Bourse.
http://stockproinfo.com/doc/1999/COFISEM_FR0000075699_1999_19991231_FR_1P.pdf 1999, pg 47
[11]Julie-Anne De Queiroz, « MOOCs : seuls 5 % des inscrits valident leur formation », Le Figaro Etudiant, https://etudiant.lefigaro.fr/les-news/actu/detail/article/moocs-seuls-5-des-inscrits-valident-leurs-formation-4534/, 2014 (consulté le 5 Novembre 2020)
[12]« CNED ». http://modules.cned.fr/flipbookRA/2018/index.html (consulté le nov. 08, 2020).
[13] Collin, « Donner des cours particuliers à distance : 6 sites au TOP », TAD, avr. 26, 2020. https://www.travailler-a-domicile.fr/idees-travail-a-domicile/5-plateformes-en-ligne-pour-donner-des-cours-particuliers-a-distance/ (consulté le nov. 08, 2020).
Hypn-Etat de l’art
Groupe 4
BOUTHET Elodie
LEBORGNE Roméo
SAMMARI Akram
Hypn-Etat de l’art
Introduction
Nous passons un tiers de notre vie à dormir. Le sommeil est indispensable à la vie et pourtant, bien dormir devient de plus en plus difficile. En effet, on observe une augmentation de la fréquence des troubles du sommeil ces dernières décennies [14]. En France, ces troubles touchent toutes les tranches d’âge et notamment les femmes et les personnes âgées [10] mais ils augmentent aussi chez les adolescents [6, 13]. En effet, jusqu’à 50% des adolescents souffrent de troubles du sommeil persistants selon des études récentes. Les problèmes de sommeil ont augmenté de façon non négligeable dans la population générale entre 1995 et 2005 de 43,7% à 46,7% et ce de façon différente selon les âges. Observant également ces troubles occasionnellement, nous avons choisi de nous intéresser d’un peu plus près à ce thème du sommeil. De par la découverte de ce sujet, nous espérons pouvoir améliorer la qualité de sommeil des personnes concernées d’autant plus que celle-ci a un fort impact sur la santé.
Nous allons dans un premier temps définir le sujet et les éléments autour de celui-ci. Puis, nous étudierons les problématiques liées à notre sujet et les solutions déjà existantes. Enfin, nous présenterons nos hypothèses de travail pour la suite de nos recherches.
Définitions
Le sommeil
Le sommeil est un état physiologique périodique et réversible caractérisé par une diminution de l’état de conscience et une limitation des processus perpétuels [9].
![]()
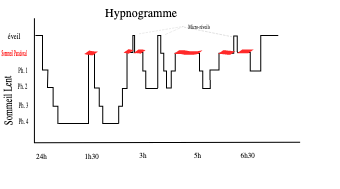
On peut différencier deux états du sommeil : le sommeil lent et le sommeil paradoxal. Le premier est lui-même séparé en 3 stades, de l’endormissement au sommeil lent profond en passant par le sommeil lent léger, le tout avec une activité mentale minimale. Le sommeil paradoxal, quant à lui, s’accompagne d’une activité cérébrale intense, le rêve.
Pendant le sommeil léger, l’individu peut facilement se faire réveiller par les stimulations du monde extérieur : bruit, lumière ou même sensation [19]. Il est très difficile de réveiller le dormeur pendant son sommeil lent profond tant cette phase de sommeil est lourde et reposante. Lorsqu’on y parvient, celui-ci se retrouve dans un état de torpeur appelé inertie du sommeil. Le sommeil paradoxal est quant à lui très réparateur de la fatigue psychologique, du stress et intervient dans la mémorisation. Un réveil pendant ce dernier sera assez mal ressenti par l’individu qui sent son rêve interrompu.
La définition de l’endormissement est complexe : la phase d’endormissement correspond à la transition entre la veille et le sommeil ; c’est une sorte de somnolence semi-consciente, où les pensées vagabondent. La respiration ralentit, tout comme le rythme cardiaque. Il est défini soit par la rupture de l’état de conscience soit par le ralentissement de l’activité électro-encéphalographique sur une durée de plus de 15 secondes.
On observe aussi des difficultés à définir le réveil. De même, le réveil peut être caractérisé par un retour à un état de conscience complet ou une accélération brutale de l’activité électro-encéphalographique et une augmentation du tonus musculaire.
Le rythme circadien
Communément appelée horloge interne, le rythme circadien régule les différentes fonctions de l’organisme. L’homme est naturellement fait pour rester éveillé le jour et dormir la nuit [4]. Cependant, cette horloge biologique se modifie, non seulement avec l’âge et les conditions de vie, mais aussi avec l’évolution de son environnement.
La production de mélatonine, hormone sécrétée chez l’homme pendant la nuit, est entraînée par l’alternance de lumière et d’obscurité. Celle-ci semble intervenir dans le cycle du sommeil. En effet, elle contribue à une baisse de la température corporelle nocturne, facilitant ainsi l’installation du sommeil [2]. De plus, elle réduit le retard d’endormissement et augmente la qualité et la durée du sommeil [11, 13].
Or, avec le développement de la lumière artificielle, cette sécrétion est modifiée et le rythme circadien s’est décalé le matin [4]. D’autres facteurs peuvent influer sur l’horloge interne comme le décalage horaire et le travail posté [17].
Problématiques
Notre problématique est de pouvoir améliorer la qualité du sommeil des personnes concernées par des troubles du sommeil. Nous avons pu voir dans l’introduction que les personnes les plus touchées étaient les femmes, les personnes âgées et les adolescents. Nous allons essayer de voir les raisons pour lesquelles ces populations sont le plus touchées.
Au premier abord, nous avions surtout pensé à l’influence des écrans reculant la phase d’endormissement [3,5]. Mais, de par nos recherches, il existe également bien des phénomènes tels que l’apnée du sommeil, les troubles neurologiques et médicaux, l’utilisation de substances psychoactives [7] mais aussi la vieillesse qui touchent l’endormissement, le sommeil ou même le réveil [1, 16].
Troubles du sommeil chez les femmes
Il y a très peu d’études sur les raisons pour lesquelles les femmes seraient plus touchées par les troubles du sommeil que les hommes.
Une hypothèse serait que les femmes sont plus à même à déclarer leurs troubles de santé mentale à leur proches ou à des personnels de santé [12]. Les inégalités sociales comme les différences de position et de statut social entre les hommes et les femmes auraient également un impact, notamment sur la santé mentale des femmes (stress, anxiété, dépression, …) [20]. Les études pourraient donc en partie être biaisées par cette différence de genre.
Néanmoins, les modifications du sommeil notées chez les femmes âgées pourraient quant à elles être en partie liées aux modifications hormonales induites par la ménopause, dont la déficience en œstrogènes.
Troubles du sommeil chez les personnes âgées
Les troubles du sommeil touchent environ la moitié des personnes âgées de plus de 65 ans. Le sommeil se modifie avec l’âge [21]. Le temps de sommeil diminue mais est compensé par l’augmentation de fréquence des siestes diurnes. On met plus de temps à s’endormir mais on se couche et on se lève plus tôt. Le sommeil profond lent, sommeil lourd et réparateur, disparaît presque totalement après 70 ans, notamment chez l’homme.
Ces troubles sont en augmentation chez la personne âgée en partie aussi à cause de l’importance des pathologies médicales et psychiatriques chez les sujets. On peut penser notamment aux démences, plus fréquentes chez le sujet âgé, les douleurs chroniques, les pathologies urologiques chroniques (comme la nycturie) ou encore les désordres respiratoires.
Troubles du sommeil chez les adolescents
Les enfants et les adolescents sont de plus en plus touchés également par les troubles du sommeil. 15 à 27% des enfants d’âge scolaire auraient des troubles du sommeil [22]. Plus de la moitié des adolescents se sentent somnolents au réveil ou dans la journée au moins une fois par semaine. A partir du collège, l’apparition de la puberté, la pression scolaire et la diminution de l’influence parentale sont des facteurs de risque [23].
Les raisons, autres que médicales, seraient liées à l’environnement, la présence d’écrans dans la chambre et la consommation trop importante de ces écrans. Selon le rapport de l’Observatoire français des drogues et des toxicomanies publié en décembre 2016, les adolescents passeraient près de 5 heures par jour à 11 ans et plus de 8 heures par jour à 15 ans devant les écrans.
L’utilisation de télévision, d’ordinateur, de jeux vidéo et de smartphones entraîne à terme une diminution du temps de sommeil, un rythme veille-sommeil retardé et une augmentation des troubles du sommeil [24].
Il manque encore des études qui puissent être accessibles aux parents et aux enfants afin de pouvoir réaliser les conséquences de la sur-utilisation des écrans sur le sommeil et la santé des enfants et des adolescents [25]. Des recommandations comme ne pas avoir d’écran dans la chambre à coucher et parler de l’importance d’un sommeil qualitatif sont importantes à mettre en place.
Nous avons donc au final élargi notre réflexion à la problématique de consommation des écrans entraînant des troubles du sommeil.
Solutions existantes
Pour faciliter le sommeil, on distingue deux types de solutions, les solutions naturelles et les solutions dites non naturelles ou chimiques.
Solutions médicamenteuses naturelles
Les solutions naturelles sont généralement des somnifère naturels à base d’herbologie, on peut citer les tisanes, la fleur d’oranger ou encore la verveine qui est une plante anti-stress qui est utilisée pour aider à trouver le sommeil et se détendre à tout moment de la journée. La fleur d’oranger quant à elle favorise l’endormissement grâce à ses effets sédatifs. Au sein de notre société on s’y réfère le plus souvent en les appelant “remède de grand mère”.
Solutions médicamenteuses non naturelles
Les solutions non naturelles correspondent aux médicaments issus de la pharmacologie ou de l’industrie pharmaceutique. Ce sont les anxiolytiques et somnifères plus ou moins puissants, généralement prescrits pour lutter contre l’insomnie et les terreurs nocturnes.
Activité sportive et relaxantes
Certains choisissent d’adopter une activité physique régulière afin de relâcher le stress accumulé au fil des journées de la semaine. Ceci permet d’avoir un esprit détendu dans un corps en bonne santé, dénué de stimulus négatifs et donc moins réceptif aux sources nuisibles pouvant causer une insomnie ou une mauvaise qualité de sommeil.
La plupart des études menée confirme que les personnes sportives et ayant de fait une bonne hygiène de vie dormaient mieux que les personnes ne pratiquant pas d’activités sportives. La pratique de l’activité physique aide à mieux dormir, en facilitant l’endormissement et un sommeil réparateur. [18]
Il existe de nombreuses techniques de relaxation pour dormir. En vous aidant à lâcher prise, elles vous permettront de trouver alors le sommeil plus facilement. Il s’agit de technique rudimentaire qui ont prouvé leur efficacité. Cela consiste en des exercices de respiration le plus souvent. On peut citer entre autre les techniques du “cachier” ou encore le “4-7-8” [26]
Solutions technologiques
Profitant des évolutions technologiques, certains profitent des objets connectés pour essayer de remédier aux troubles du sommeil, à l’apné du sommeil ou encore aux ronflements. C’est le cas de certaines mutuelles santés vont jusqu’à proposer des offres “objets connectés” destinés à la prévention contre les troubles du sommeil. La technologie permet de décortiquer le cycle du sommeil d’une personne et d’ainsi d’offrir aux personnes atteinte de troubles de sommeils d’une analyse poussé qui permet de savoir quelle est la source de leur insomnie (rythme cardiaque, confort…) [8]
Parmis ces objets connectés on peut citer des bandeaux intelligents, des capteurs, des lampes connectés ou encore un matelas intelligent truffé de capteurs biométriques [15]. Tous ces objets sont liés à une application qui permet d’obtenir toutes les informations liés au sommeil de l’utilisateur. Ainsi, ces applications donnent une vue d’ensemble plus large et plus riches en informations pour les soignants comme pour les patients.
Notons que des multinationales de renoms se sont lancés dans ce marché. On peut citer Nokia ou encore Philips.
Attitude parentale
Il est important de savoir adapter les solutions aux différentes catégories d’âge des individus. Ainsi, il est fortement déconseillé de donner des somnifères à des enfants et à des adolescents, cela pourrait entraîner des dépendances aux somnifères et aux produits chimiques.
Pour remédier aux problèmes du sommeil de l’enfant, l’action et l’attitude des parents est déterminante, elle peut aussi bien régler qu’empirer la situation. Des parents avec une attitude nonchalante et qui habituent leurs enfants aux écrans ne se rendent pas compte que l’accès en continu et sans limite des enfants au écran peut être la raison principale des problèmes d’insomnies de ceux-ci. Un contrôle plus ferme, avec un “couvre-feu technologique” qui peut se traduire par une application qui empêche tout accès à internet peut être une solution.
Une solution similaire avec plus de flexibilité peut aussi convenir aux jeunes adolescents.
Conclusion
Suite à nos recherches, nous avons pu nous rendre compte de la complexité du sujet et des nombreux facteurs troublant le sommeil. Celles-ci nous ont amené à cibler un public plus particulier pour la suite du projet.
Nous avons décidé d’étudier les troubles du sommeil chez les adolescents et plus particulièrement de travailler sur de la prévention et de la pédagogie par rapport à l’importance du sommeil et à la sur-utilisation des écrans. En effet, nous pensons que c’est autour de cet âge qu’il faut faut empêcher la prise d’habitudes d’utilisation du smartphone le soir dont il est difficile de se défaire après coup.
Nos hypothèses à valider ou invalider lors de l’étude terrain seront donc:
- L’utilisation des écrans le soir éloigne la phase d’endormissement
- Les stimulis cognitifs (réseaux sociaux, notifications, …) éloignent et retardent la phase d’endormissement
Bibliographie
[1]
« Prévalence et comorbidité des troubles du sommeil dans la population générale », LA REVUE DU PRATICIEN, vol. 57, p. 8, 2007.
[2]
- J. Strassman, C. R. Qualls, E. J. Lisansky, et G. T. Peake, « Elevated rectal temperature produced by all-night bright light is reversed by melatonin infusion in men », Journal of Applied Physiology, déc. 1991, doi: 10.1152/jappl.1991.71.6.2178.
[3]
- Cajochen et al., « Evening exposure to a light-emitting diodes (LED)-backlit computer screen affects circadian physiology and cognitive performance », J. Appl. Physiol., vol. 110, no 5, p. 1432‑1438, mai 2011, doi: 10.1152/japplphysiol.00165.2011.
[4]
- Claustrat, « L’évolution du rythme veille-sommeil au cours de l’histoire de l’humanité. Influence de la lumière artificielle », Médecine du Sommeil, vol. 11, no 2, p. 68‑73, avr. 2014, doi: 10.1016/j.msom.2013.09.002.
[5]
- Vahlensieck, « Le smartphone à côté du lit perturbe le sommeil », Horizons – Le magazine suisse de la recherche scientifique, juin 06, 2019. https://www.revue-horizons.ch/2019/06/06/le-smartphone-a-cote-du-lit-perturbe-le-sommeil/ (consulté le sept. 30, 2020).
[6]
- Bailly, I. Bailly-Lambin, D. Querleu, R. Beuscart, et C. Collinet, « Le sommeil des adolescents et ses troubles une enquête en milieu scolaire », L’Encéphale, vol. 30, no 4, p. 352‑359, sept. 2004, doi: 10.1016/S0013-7006(04)95447-4.
[7]
- Léger, « Le temps de sommeil en France / Sleep Time in France », p. 30.
[8]
« Les examens du sommeil », Réseau Morphée. https://reseau-morphee.fr/le-sommeil-et-ses-troubles-informations/comment-explorer-le-sommeil (consulté le sept. 30, 2020).
[9]
- Dauvilliers, Les troubles du sommeil. Elsevier Health Sciences, 2019. https://books.google.fr/books?id=FCqVDwAAQBAJ. (consulté le sept. 30, 2020).
[10]
- Beck, C. Léon, et D. Léger, « Les troubles du sommeil en population générale – Évolution 1995-2005 des prévalences et facteurs sociodémographiques associés », Med Sci (Paris), vol. 25, no 2, Art. no 2, févr. 2009, doi: 10.1051/medsci/2009252201.
[11]
- Nave, R. Peled, P. Lavie, « Melatonin improves evening napping ». https://reader.elsevier.com/reader/sd/pii/0014299994007694?token=C7EC2513B7F0AD33F1A3387BB801BD69FB887178FDF60C076E1FA32C93B1D9B2C9591A311290480EDA5E0669C7EDD872 (consulté le oct. 06, 2020).
[12]
- Beck, J.-B. Richard, et D. Léger, « Prévalence et facteurs sociodémographiques associés à l’insomnie et au temps de sommeil en France (15–85ans) », Revue Neurologique, vol. 169, no 12, p. 956‑964, déc. 2013, doi: 10.1016/j.neurol.2013.02.011.
[13]
- Haimov et al., « Sleep disorders and melatonin rhythms in elderly people », BMJ, vol. 309, no 6948, p. 167‑167, juill. 1994, doi: 10.1136/bmj.309.6948.167.
[14]
« Sommeil », Inserm – La science pour la santé. https://www.inserm.fr/information-en-sante/dossiers-information/sommeil (consulté le oct. 05, 2020).
[15]
- Mayer, « Sommeil : 5 objets connectés pour mieux dormir ? », Futura. https://www.futura-sciences.com/sante/questions-reponses/sommeil-sommeil-5-objets-connectes-mieux-dormir-8388/ (consulté le oct. 06, 2020).
[16]
- Poirot et C. Schröder, Sommeil, rythmes et psychiatrie. Dunod, 2016.
[17]
« Troubles du rythme circadien du sommeil – Troubles neurologiques », Édition professionnelle du Manuel MSD. https://www.msdmanuals.com/fr/professional/troubles-neurologiques/troubles-du-sommeil-et-de-la-vigilance/troubles-du-rythme-circadien-du-sommeil (consulté le oct. 06, 2020).
Cenas, «Quel est le lien entre sport et sommeil ? », CENAS Médecine du sommeil. [18]
https://www.cenas.ch/blog-du-sommeil/lien-entre-sport-sommeil/(consulté le 8 octobre)
[19]
- Léger, « Horloge biologique et rythme veille/sommeil », Cahiers de Nutrition et de Diététique, vol. 40, no 3, p. 133‑136, juin 2005, doi: 10.1016/S0007-9960(05)80477-8.
[20]
- F. Owens et K. A. Matthews, « Sleep disturbance in healthy middle-aged women », Maturitas, vol. 30, no 1, p. 41‑50, sept. 1998, doi: 10.1016/S0378-5122(98)00039-5.
[21]
- Blain et Y. Dauvilliers, « Troubles du sommeil fréquemment observés chez le sujet âgé », NPG Neurologie – Psychiatrie – Gériatrie, vol. 10, no 55, p. 6‑13, févr. 2010, doi: 10.1016/j.npg.2009.11.009.
[22]
- Franco, « TROUBLES DU SOMMEIL DE L’ENFANT », p. 88.
[23]
- Bailly, I. Bailly-Lambin, D. Querleu, R. Beuscart, et C. Collinet, « Le sommeil des adolescents et ses troubles une enquête en milieu scolaire », L’Encéphale, vol. 30, no 4, p. 352‑359, sept. 2004, doi: 10.1016/S0013-7006(04)95447-4.
[24]
- Hale et S. Guan, « Screen time and sleep among school-aged children and adolescents: A systematic literature review », Sleep Medicine Reviews, vol. 21, p. 50‑58, juin 2015, doi: 10.1016/j.smrv.2014.07.007.
[25]
- Hale et al., « Youth Screen Media Habits and Sleep: Sleep-Friendly Screen Behavior Recommendations for Clinicians, Educators, and Parents », Child and Adolescent Psychiatric Clinics of North America, vol. 27, no 2, p. 229‑245, avr. 2018, doi: 10.1016/j.chc.2017.11.014.
[26]
DREEM « 6 technique de relaxation pour dormir» https://blog.dreem.com/fr/6-techniques-de-relaxation-pour-dormir/
CoOCPen – Interactions lors des cours particuliers à distance – Méthodologie de l’enquête terrain
Au cours de la crise épidémique du COVID-19, de nombreux cours particuliers sont passés d’un cours “en physique” à des cours “en distanciel”.
Au cours de ce projet, nous souhaitons en apprendre plus sur leur déroulement et le niveau d’interaction qu’offrent ces cours particuliers effectués “à distance”, plus particulièrement dans le domaine des sciences.
A travers différents entretiens, nous souhaitons obtenir des retours sur le ressenti des utilisateurs de ces services, que ce soient les professeurs ou les élèves.
Population cible pour les entretiens :
En s’intéressant à cette problématique, il nous est en effet logiquement apparu que les potentiels utilisateurs de notre solution sont les personnes habituées à suivre ou à donner des cours particuliers, et qui ne sont pas réfractaires à les suivre en ligne.
Professeurs:
Pour ce qui est de donner des cours particuliers, nous aimerions rencontrer en priorité des professeurs qui ont déjà donné des cours particuliers à la fois chez l’habitant et à distance, afin d’avoir un comparatif d’expérience. Dans un second temps, il pourrait être intéressant d’interroger des professeurs qui ne sont pas passés aux cours à distance malgré le contexte épidémique, afin par exemple de savoir ce qui les freine.
Les personnes ciblées sont prioritairement des étudiants du supérieur donnant des cours de sciences – Mathématiques, Physique, Chimie…-. Nous commencerons naturellement par interroger des professeurs étudiants à IMT Atlantique, en s’intéressant aussi à des profils . Nous contacterons ensuite éventuellement d’autres professeurs via des sites d’annonces comme Le Bon Coin ou Super Prof.
Élèves:
Nous privilégions des élèves qui prennent des cours particuliers en ligne, et qui dans l’idéal ont aussi eu l’occasion d’en faire “en physique”. Les problématiques diffèrent selon leur avancement dans leurs études. Tout d’abord se pose la question de l’âge : en effet, si ce sont des élèves du secondaire, ils sont mineurs et il nous faudra donc demander l’autorisation à leur responsable légal avant de s’entretenir avec eux. Ensuite, les demandes de cours particuliers ne sont pas les mêmes : souvent, ils sont dispensés lorsque les familles ne peuvent plus venir en aide ou pour préparer des échéances tels que le Bac ou des concours.
De ce fait, nous nous concentrerons plus sur des élèves actuellement au lycée ou dans le supérieur. Pour entrer en contact avec eux, nous estimons que le plus simple est de s’adresser directement à des élèves des professeurs interrogés ou à des connaissances de frères et soeurs. Si nécessaire, notre autre option serait de se rendre directement dans un lycée et d’interroger des élèves à leur sortie.
Objectifs des entretiens:
Au cours de ces rencontres, nous essaierons d’analyser le ressenti des personnes qui ont effectué des cours particuliers à distance. Pour cela, nous les interrogerons autour de différentes thématiques :
- leurs expériences personnelles de ces cours : des anecdotes, des systèmes D utilisés …,
- les différences ressenties en termes d’interactions avec des cours particuliers “en physique”,
- le matériel mis à disposition pour mener la leçon (tableau interactif, …)
- les points positifs et négatifs, les frustrations mais aussi l’attrait ou non pour ce format de cours particuliers,
- la récurrence de ces cours et leur prolongement en période plus normale.
A partir des réponses qui nous seront faites, nous chercherons à valider/invalider certaines hypothèses que nous formulons aujourd’hui :
- le niveau d’interaction permis par le distanciel n’est pas aujourd’hui à la hauteur de celui d’un cours “en physique”, en particulier dans le cadre de cours scientifiques.
- les gens choisissent généralement de faire des cours particuliers en présentiel car ils ne disposent pas d’une alternative de qualité suffisante.
- les gens ne sont pas réfractaires à des cours en particulier à distance, si la qualité d’un cours en distanciel peut être conservée.
Et après ?
Une fois ces entretiens effectués, nous souhaiterions réaliser une expérience en immersion, afin de nous rendre compte des problèmes rencontrés et observer si l’on trouve des résonances avec ce qui est ressorti des entretiens.
Hypn – Méthodologie de l’étude terrain
Equipe du projet : Elodie Bouthet, Akram Ghaith Sammari, Roméo Leborgne
Problématique
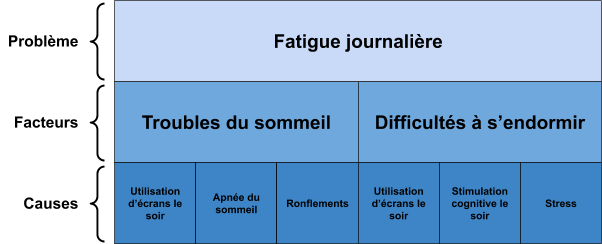
Notre projet se concentre sur l’amélioration de la qualité du sommeil afin de palier au problème de la fatigue journalière chronique.
Notre problématique à travers cette étude terrain est donc de déterminer les facteurs principaux induisant cette fatigue. Une fois ces facteurs mis au clair, il nous faudra creuser pour trouver leurs causes.
Exemple potentiel :
Un fois cette hiérarchie déterminée et clarifiée, il nous faudra choisir sur quel facteur et quelle cause agir pour diminuer la fatigue journalière. Ce choix devra évidemment se faire sur la base des informations recueillies lors de l’enquête terrain.
Hypothèses
Bien que l’enquête terrain soit indispensable afin de confirmer ou d’infirmer n’importe quelle hypothèse, notre travail préalable d’état de l’art et de recherches bibliographiques, ainsi que nos connaissances personnelles, nous ont permis d’établir une liste de causes et de facteurs potentiels.
Facteurs potentiels :
- Troubles du sommeil
- Mauvaise qualité de sommeil
- Mauvaise quantité de sommeil
Causes potentielles :
- Exposition à la lumière bleue le soir
- Stimulation cognitive le soir
- Stimulation physique le soir
- Stress / Charge mentale
- Apnées du sommeil
- Nuisances sonores (ronflements, bruits ambiants)
- Nuisances lumineuse
- Nuisances physiques (mouvements, chutes, matelas, …)
- Nuisances physiologiques (maladies, douleurs, …)
- Mauvaise gestion des cycles du sommeil (réveil en phase profonde)
- Prise de produits stimulants (caféine, théine, alcool, drogue, …)
Entretiens prévus
Utilisateurs
Notre sujet restant pour l’instant très large, nous ne pouvons pas cibler de personnes ou de groupes de personnes précises. Ainsi, pour notre première volée d’entretiens sur le terrain, nous souhaitons nous entretenir avec un grand nombre de personnes de tous genres, en notant scrupuleusement les caractéristiques de chaque, afin de pouvoir par la suite recouper les informations et y discerner un pattern. Nous avons donc établi une liste non exhaustive des caractéristiques que nous allons surveiller lors des entretiens afin d’établir des profils types d’utilisateurs :
- Sexe
- Âge
- Activité professionnelle/personnelle
- Situation familiale/amoureuse
- Habitudes de vie
- Etat de santé
Afin d’avoir des réponses pertinentes, nous avons tout de même imaginé un squelette d’entretien qualitatif semi-directif qui nous servira de trame lors d’études terrain en micro-trottoir. En cette période d’épidémie et de mauvais temps, nous allons nous diriger vers des lieux passants comme l’entrée d’un centre commercial ou la sortie des écoles afin de recueillir un maximum d’interviews différentes.
Squelette d’entretien qualitatif :
- Se présenter : Élèves à IMT Atlantique, dans le cadre d’un projet de recherche sur l’influence des habitudes de vie sur la qualité du sommeil des … (en fonction de la personne).
- Rassurer la personne : Il n’y a pas de bonnes réponses, juste une enquête honnête et sans jugement
- Noter les informations sur la personne : nom, âge, métier, sexe
- Lancer la discussion : Pouvez-vous nous décrire votre journée type ? Êtes-vous en forme aujourd’hui ? Et en général ?
- Aborder le sujet si nécessaire : Si on dit “sommeil”, vous pensez à quoi ?
- Relancer si nécessaire : Quelles sont vos morning/evening routine (semaine/we) ?
- Approfondir si le sujet est abordé par la personne :
⇒ Habitudes de vie : alimentation (stimulants : café, thé, alcool, …), sports, siestes, fumeur, fêtard, hobbies, …
⇒ Situation familiale : enfants, conjoint(e), sommeil à 2 (ronflements, gestes parasites, …)
⇒ Troubles du sommeil (apnée du sommeil, pollution sonore/lumineuse/physique, …)
⇒ Utilisation de la technologie : Temps d’écran en journée et le soir, activités stimulantes (réseaux sociaux, vidéos, musiques, lecture)
⇒ Autres facteurs : Stress ? Maladies ?
Professionnels et associations
Afin de nous permettre de mieux appréhender et préciser le problème, nous allons prendre contact avec plusieurs entités travaillant dans le domaine du sommeil afin d’avoir des entretiens avec leurs experts :
- Centre du sommeil à l’hôpital de Brest : Jérémy Lefranc et Emilie Le Cadet
- Associations de victimes de troubles du sommeil : Réseau morphée, Sommeil et santé, INSV (Institut National du Sommeil et de la Vigilance), France Insomnie
- Marchand de literie : Univers du sommeil
Executive Summary – projet Blind Climbers
Blind Climbers – Executive Summary
Ce projet intitulé “Blind Climber” en coopération avec l’association “Les Désordinateurs Communicants” a eu lieu durant le semestre de printemps 2020 et s’inscrit dans une démarche plus large de l’ouverture de la pratique de l’escalade aux déficients visuels. Les outils technologiques disponibles actuellement pourraient permettre la localisation du grimpeur, la détermination de la prochaine prise à attraper et enfin la transmission des informations utiles pour attraper cette prise. L’objectif de ce projet était d’investiguer les moyens de transmission de l’information et de prodiguer conseils et analyses quant aux solutions envisagées.
La première étape du projet fût l’écriture d’un état de l’art sur les technologies de transmission d’informations à des personnes déficientes visuelles. Ces systèmes se basent le plus souvent sur la suppléance perceptive. Les déficients visuels peuvent ainsi être aidés par de nombreux systèmes simples se basant sur le toucher – comme le braille, les cannes ou les guides – ou sur l’ouïe comme les liseuses d’écran. D’autres systèmes plus complexes (comme les matrices tactiles ou la traduction d’images en sons) peuvent aussi venir en complément mais doivent faire attention à ne pas surcharger l’utilisateur avec des informations peu utiles. Tous ces systèmes ont pour point commun d’aider les personnes déficientes visuelles dans leur quotidien mais omettent complètement leur pratique sportive. En effet, les innovations technologiques dans ce domaine sont peu nombreuses et les sports pouvant être pratiqués nécessitent le plus souvent un voyant ou des règles spéciales.
La deuxième étape du projet a pour objectif de nous confronter au terrain en allant interroger des grimpeurs déficients visuels. Les réponses des interrogés nous ont permis de faire ressortir plusieurs points saillants. Premièrement, les déficients visuels utilisent le plus souvent des téléphones de la marque Apple et c’est donc des applications compatibles avec cette marque qu’il faut développer. Deuxièmement, le sens à privilégier lors de l’escalade semble être le toucher puisque l’ouïe est déjà très sollicitée. Cependant, un système d’oreillettes semble déjà être un pas dans le bon sens pour permettre une pratique plus agréable. Concernant le type d’information à restituer, les deux déficients visuels interrogés semblent être d’accord sur les informations essentielles à envoyer à savoir distance, direction, taille de la prise et membre à utiliser (pas obligatoirement membre gauche ou droit mais au moins postérieur ou antérieur) et sur les informations inutiles (degré d’avancement, forme de la prise). Ils sont par contre en désaccord sur la manière de leur restituer ces ordres – cadran horaire ou gauche/droite pour la direction, longueur de bras ou cm pour la distance – ainsi que sur la possibilité de corriger le grimpeur quand l’ordre n’a pas été correctement effectué.
La troisième partie du projet a été consacrée à des tests d’une application de son binaural (disponible sur le lien suivant : https://framagit.org/lesdesordinateurs/audioxyz). Cette technologie pourrait être utilisée afin de permettre aux grimpeurs de localiser la prise et le type de son utilisé pour transmettre des informations supplémentaires. Cette application se basant sur les bibliothèques VR de Google, il est impossible de modifier en substance le code. Nous avons choisi d’effectuer deux phases de tests. La première sur des personnes n’ayant jamais utiliser de technologie de son binaural et la deuxième sur des personnes entraînées. Les résultats montrent que les personnes entraînées réussissent nettement à localiser les sons que ceux non entraînés. On passe de 35% à 63% de réussite. Cependant, même le meilleur taux de réussite ne semble pas suffisant pour une utilisation autonome du dispositif.
figure 1 – Résultats du test de son binaural sur des élèves novices

figure 2 – Résultats du test de son binaural sur des élèves entrainés
En conclusion, on peut dire que l’utilisation de l’application nécessite un entraînement. Cependant, même après entraînement, il semble difficile de considérer l’utilisation de l’application en toute autonomie. Si quelqu’un souhaite reprendre ce projet, aux vues des difficultés à situer un son sur l’axe vertical, nous lui conseillons d’effectuer les tests avec un son binaural mouvant du point d’origine à sa destination finale afin de décider si l’application doit être abandonnée ou si celle-ci peut être utile. En complément, nous proposons de tester des systèmes de restitution par le toucher comme des bracelets vibrants ou une matrice tactile.
Etat de l’art – projet Blind Climbers
Voici donc l’état de l’art rédigé par les étudiants de l’IMT Atlantique Jean-Baptiste GARDEL, Clément RUBIN et Eric TOBITT, dans le cadre de leur projet S5.
Vous trouverez donc l’introduction de cet état de l’art ci§dessous ainsi qu’un lien vers le document complet ici.
Blind Climber – Etat de l’art
Introduction
Dans le cadre de notre projet « BlindClimber » soutenu par Les Désordinateurs Communicants (LDC) et IMT Atlantique, nous nous sommes intéressés à la restitution d’informations visuelles à des personnes déficientes visuelles en particulier, afin de les aider à grimper en autonomie. L’asso- ciation LDC aide en effet des personnes déficientes visuelles à pratiquer l’escalade sur la commune de Brest.
Le travail effectué par l’association permet à de nombreux aveugles et malvoyants de pratiquer un sport qui leur était avant impossible. Plus généralement, la pratique d’activités sportives reste compliquée pour cette partie de la population. De plus, les sports pratiqués par les personnes déficientes visuelles sont peu nombreux puisqu’une adaptation des règles est nécessaire. Ouvrir la pratique de l’escalade en autonomie à des personnes déficientes visuelles est donc un moyen de diversifier les pratiques sportives et d’ouvrir la voie à l’ouverture d’autres disciplines à ce public. La diversification des pratiques sportives est en outre particulièrement recherchée par les athlètes déficients visuels.
La nécessité de s’acculturer aux méthodes de restitutions d’informations visuelles ainsi qu’aux fondements théoriques de la suppléance perceptive est réelle. Comment mener un projet de restitu- tion visuelle sans connaître les réussites et les échecs dans ce domaine ? Nous nous serions précipité dans le mur. En effet, étant tous voyants et ne côtoyant pas de personnes déficientes visuelles dans notre quotidien, nous manquions cruellement de connaissances sur ce sujet. Ce travail nous a donc permis de saisir les tenants et les aboutissants de la suppléance perceptive, les causes de la cécité mais aussi les moyens déjà mis en œuvre pour faciliter la pratique du sport par un public déficient visuel.
La rédaction de ce document n’a pas été aisée du début à la fin. En effet, les sources traitant du sujet de la pratique du sport par des personnes déficientes visuelles sont peu nombreuses autant du côté de la littérature scientifique que des journaux grand public. De surcroît, les innovations dans ce domaine se concentrent plus autour de la randonnée et de l’autonomie dans les déplacements quotidiens que sur la pratique réelle de sports quelque soit le niveau de performance souhaité.
La première partie de ce document est dédiée au rappel de quelques généralités sur le handicap visuel. Nous parlerons en particulier du fonctionnement de l’oeil humain, de ce que sont la cécité et la malvoyance et comment les définir, de l’origine de ces troubles de la vision ainsi que de la place particulière qu’occupe la cécité dans notre société.
Nous nous attaquerons ensuite, dans une deuxième partie, aux différentes méthodes de sup- pléance perceptive en commençant par les fondements théoriques de celle-ci avant de regarder quels sont les sens concernés et comment ceux-ci peuvent être utilisés pour restituer de l’information vi- suelle à des personnes aveugles ou malvoyantes.
Nous traiterons enfin dans une troisième partie les modalités de pratique du sport par des personnes déficientes visuelles sous l’angle des règlements des compétitions internationales et des innovations leur allouant plus d’autonomie.
L’art s’invite au Fablab

Grâce à la découpeuse LASER du Fablab, j’ai pu réalisé cette superposition de couches, inspirées d’une oeuvre d’art existante. Le modèle d’ours se compose de 6 couches pour donner cette impression de profondeur.
Les dessins ont été fait sur Corel Draw, couches après couches.
Merci à Mathilde pour son aide.
