
- Répartition dans le transport en commun et l’incertitude sur l’état des prochaines services
- OBO: Étude Terrain et Personas
- OBO: Une solution à l’information pertinente sur l’encombrement dans le transport en commun
14/12/2022
Andrés Ricardo CÉSPEDES GARCÍA, Fabrice KOUAME, Daniel Alejandro TERÁN FERNÁNDEZ,
Le transport public est le mode de transport le plus utilisé et le plus populaire en France pour les déplacements dans et hors de la ville. Alors, il y a de nombreux projets pour améliorer les conditions de voyages car les gens peuvent hésiter à l’heure d’utiliser les transports en commun car ils ont des problèmes. Selon la recherche documentaire, on a trouvé que les plus importants problèmes sont le manque de confort [1], la saturation du système [2] et l’incertitude quant à l’état de saturation du prochain service [3]. Ces problèmes de transports publics sont récurrents et doivent être résolus pour inciter davantage de personnes à utiliser les transports publics. Ce projet vise à résoudre un problème réel autour du transport et à répondre à la question :
Comment aider le passager à prendre la décision du choix du véhicule (actuel ou prochain), ainsi que l’entrée dans le véhicule, afin d’améliorer son confort et donc sa satisfaction lors de l’utilisation de ce moyen de transport ?
Ce projet vise à aider à trouver des solutions éco-durables et efficaces pour que les utilisateurs puissent toujours voyager dans le confort.
OBO : Solution technique
On a conçu un système qui permet de donner l’information d’encombrement des prochaines deux services afin que les utilisateurs puissent avoir plusieurs options pour prendre une meilleure décision sur quel service et dans quel wagon entrer dans le système.
Le fonctionnement est basé sur l’usage d’une caméra pour faire la reconnaissance des personnes sur le transport et un affichage pour donner l’information aux usagers. l’idée est que l’utilisateur verra l’affichage et pourra obtenir une pourcentage d’encombrement de chaque wagon, la position de chacun et ainsi, déterminer la position du wagon qu’il est intéressé. La lecture doit être simple et facile à comprendre pour permettre rapidement la prise de décision des utilisateurs.

Fonctionnement détaillé
Il y a trois composantes principales: L’obtention et le traitement de données dans le transport, la communication sans fils et la réception et affichage de l’information. L’architecture du matériel est ci-dessous. À gauche, le système qui est connecté dans le bus qui a la caméra et le processus. On va compter ici le nombre de personnes et obtenir le pourcentage d’encombrement à transmettre par un module ou antenne vers l’arrêt. Donc, Il est nécessaire un module de transmission et un autre de réception pour la communication sans fil; dans ce cas, il est proposé le protocole LoRaWAN. Au moment que l’information est arrivée jusqu’à l’arrêt, le processeur va montrer l’interface d’utilisateur avec l’information pertinente d’encombrement.
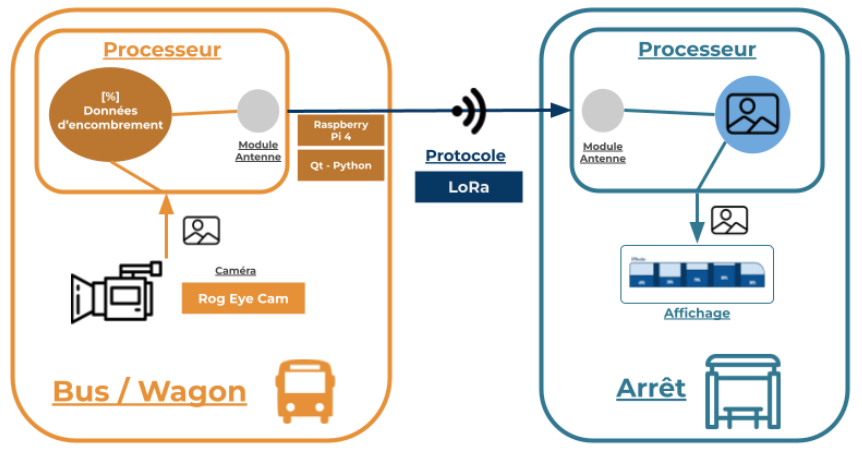
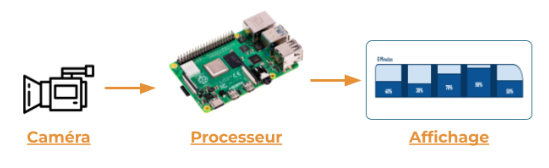
D’une manière simplifiée, le montage réalisé compte avec la reconnaissance des personnes avec la caméra, l’obtention du pourcentage d’encombrement et la création de l’interface dans le raspberry Pi et à la fin, l’affichage.
Reconnaissance d’encombrement
Il y a plusieurs méthodes de reconnaissance d’encombrement avec le traitement des images [4][5][6]. En trouvant la méthode appropriée, on a choisi le reconnaissance des silhouettes des personnes puisqu’il permet d’obtenir un nombre des personnes dans chaque wagon avec un certaine exactitude. Des autres méthodes comme le compteur de personnes qui entrent et sortent et la reconnaissance faciale sont exclus. L’image ci-dessous est un exemple de l’ image et le nombre de silhouettes reconnues avec la caméra [7].

La caméra qui est positionnée dans chaque wagon du transport compte les personnes et les compare avec le nombre maximum permis. Pour ce projet, on a estimé que dans chaque wagon de tramway, il y a maximum 30 personnes dans chaque wagon selon l’enquête de terrain faite et le recherche sur les capacités communes en France. Du coup, on obtient le pourcentage d’encombrement à afficher après.
Affichage de l’information
Tout l’interaction avec l’utilisateur sera à travers de l’affichage. Alors, on a créé une interface en python en utilisant XXX. L’information importante est le nom de l’arrêt, le nom du service, le pourcentage d’encombrement, la symbolisation de l’orientation du transport et la localisation de chaque wagon (en cas du tram ou du métro). L’interface créée est montrée ci-dessous.
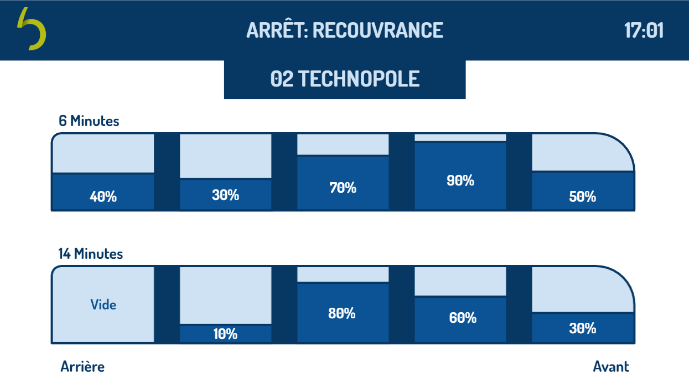
Le image ci-dessus montre comme d’une manière graphique, le remplissage de chaque wagon correspond avec le pourcentage d’encombrement qui va être actualisé à chaque minute.
Montage
Les matériaux nécessaires sont listés ci-dessous.
- Raspberry Pi 3 / 4: Ce processeur a été choisi pour sa accessibilité sur le marché pour faire des prototypages, ainsi comme il est capable de lancer programmes de moyen demande de puissance, puisque l’analyse des images a besoin d’une processus plus fort par rapport à la puissance des autres outils de prototypages. Par exemple, l’usage des cartes Arduino ne sont pas recommandé à cause de sa puissance et les librairies disponibles.

-
- Il convient de rappeler que la raspberry a besoin d’un chargeur d’alimentation 5 V.
- Caméra HD / UHD [Rog Eye Webcam FHD]: Il est nécessaire une caméra avec suffisamment de résolution pour voir les silhouettes des personnes. Il est recommandé d’utiliser une résolution minimum HD (1280 x 720 pixels).

- Écran d’affichage: Il est recommandable de mettre en place un affichage avec une résolution minimum de 800×600 en accord avec l’interface créée. Il faut tenir compte de l’affichage du fournisseur de transport.
- Dans ce lien: https://github.com/andresrcespedes/OBO-CoOC on trouve le dossier OBO-final où on va utiliser le programme “main.py”.
Instructions de montage
- Connecter la caméra et l’affichage au processeur via HDMI et USB. Ci-dessous, l’image qui représente la connexion de la caméra «1» et l’affichage «2»
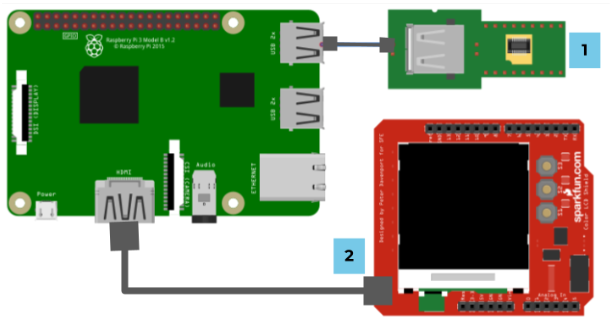
2. Allumer la Raspberry Pi et lancer le program «main.py » sur le terminal
-
- Pendant le lancement, on peut sélectionner si on utilise la caméra en temps réel (main.py -c true) ou si on utilise des images sauvegardées (main.py -i “IMAGE_PATH”).
- Il est possible de sauvegarder des images si vous voulez dans le même dossier pour les analyser.
Perspectives et travail à futur
Pour continuer ce idée pour ámeliorer l’expérience des usagers sur le transport en commun, il faut concevoir: les connexions de communication à distance entre le bus et l’arrêt, ainsi comme la création d’un database et d’une centre de gestion de dónnées puisque, pour intégrer OBO à une système de transport, il faut que le processeur à l’information de tous les arrêts et des buses ou trames. On recommend travailler avec LoRaWAN pour la communication entre objets.
D’ailleurs, la reconnaissance peut-être tester avec des images obtenus directement des caméras d’un fournisseur réel comme Bibus en Brest, ainsi comme l’interface doit être adapté à chaque ville et les afficheurs utilisés dans la ville.
Les enjeux plus importants seront l’intégration avec les ressources déjà existantes sur les systèmes de transport, ainsi que l’amélioration du système de reconnaissance des personnes, qui a besoin d’un dataset possible de rétroalimentation adapté à chaque système de transport ou il sera implémenté.
References
[1]J. Pel, N. H. Bel, et M. Pieters, « Including passengers’ response to crowding in the Dutch national train passenger assignment model », Transportation Research Part A: Policy and Practice, vol. 66, p. 111‑126, août 2014, doi: 10.1016/j.tra.2014.05.007.
[2]E. O’Toole et N. Christie, « Pregnancy and commuting on public transport », Journal of Transport & Health, vol. 24, p. 101308, mars 2022, doi: 10.1016/j.jth.2021.101308.
[3]M. Kim, S.-P. Hong, S.-J. Ko, et D. Kim, « Does crowding affect the path choice of metro passengers? », Transportation Research Part A: Policy and Practice, vol. 77, p. 292‑304, juill. 2015, doi: 10.1016/j.tra.2015.04.023.
[4] C. Wang and M. Tian, « Passenger Flow Direction Detection for Public Transportation Based on Video, » 2010 International Conference on Multimedia Communications, Hong Kong, 2010, pp. 198-201
[5] Y. Zhang, D. Zhou, S. Chen, S. Gao and Y. Ma, « Single-Image Crowd Counting via Multi-Column Convolutional Neural Network, » 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, 2016, pp. 589-597.
[6] Selvapriya P R, M. Mundada, « IoT Based Bus Transport System in Bangalore », International Journal of Engineering and Technical Research (IJETR), février 2015
[7] David Sepúlveda. People Counting Systems with OpenCV, Python, and Ubidots Ubidots. Checked the 15/12/22.
