
- Accueil de 100 collégiens
- Merite en CM2 à Bourg-Blanc
- Forum des codevsi 2023
- Course de drone au collège
- Atelier upcycling de chemise
- A la découverte du plancton – formation professeurs de primaire sciences & technologie
- Couture & broderie au Téléfab !
- Les sciences participatives au Telefab – LittObs
- La course de robots des FISE1 !
- Repair Café
- Fête de la Science 2022
- Le meuble mobile
- Robot Pepper – Hackathon ENSIBS 2020
- Médiation scientifique au collège Kerallan avec Nao le Robot
- Organisation d’un événement permettant la découverte de la programmation avec des Drones
- Robotique avec NAO pour la médiation scientifique.
- Les Fabriques du Ponant à la Maker-Faire Saint-Malo
- Maker-Faire Saint-Malo 2015 !
- L’arduino Day, un moment de découverte
- Startup day au Téléfab
- L’équipe « décibel » gagne le startup day
- Openbidouille : 2 jours de découvertes en tout genre
- 20-24 janvier : intersemestre au Téléfab… des projets dans tous les sens !
- Inauguration de la maquette zone humide
** Ce projet a été fait dans le cadre du Hackathon de l’ENSIBS qui s’est déroulé du 30 janvier au 1er février à Lorient. Des étudiants d’IMT Atlantique ont participé dans le cadre de la semaine d’intersemestre **
Introduction
 Ce projet a pour objectif d’améliorer un ancien projet traitant d’un meuble mobile destinées aux personnes âgées et à mobilité réduite. Ce dernier a été réalisé par d’autres élèves dans le cadre d’un stage de deuxième année. Notre objectif principal est d’améliorer la structure mécanique du meuble mobile et enfin de vérifier la partie programmation.
Ce projet a pour objectif d’améliorer un ancien projet traitant d’un meuble mobile destinées aux personnes âgées et à mobilité réduite. Ce dernier a été réalisé par d’autres élèves dans le cadre d’un stage de deuxième année. Notre objectif principal est d’améliorer la structure mécanique du meuble mobile et enfin de vérifier la partie programmation.
![]()
Prise en main du projet
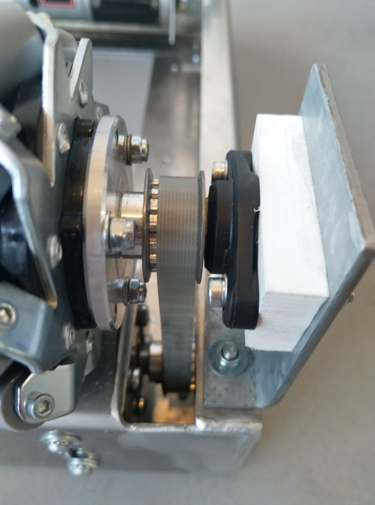
Le principal problème mécanique à résoudre était la fixation des roues mecanum : la fixation des axes était réalisée jusqu’à présent par deux liaisons pivot de chez Igus, auto-lubrifiante. Le système, hyperstatique donc, était difficile à monter et engendrait trop d’effort, si bien que les courroies sautaient des roues des moteurs.
 Une conception antérieure au Hackathon avait donc mené à choisir deux liaisons linéaires annulaires de chez Igus, de nouveau.
Une conception antérieure au Hackathon avait donc mené à choisir deux liaisons linéaires annulaires de chez Igus, de nouveau.
Le projet a tout d’abord été traité de manière séquentielle en s’intéressant en premier lieu aux améliorations à apporter à une seule roue, afin de vérifier le modèle conçue en amont, puis aux roues restante. En second lieu, nous avons apportés les modifications appropriées aux supports de chaque moteur pour les 4 roues. Enfin, nous avons vérifié le bon fonctionnement du meuble en testant quelques fonctions de déplacements.
Montage préliminaire d’une roue
Voici en substance toutes les manipulations réalisées, afin de vérifier que le nouveau système conçu est viable :
- Fixation des nouveaux paliers (liaisons linéaires annulaires) sur les équerres supports d’une roue : perçage à 4,2 mm (pour les vis)
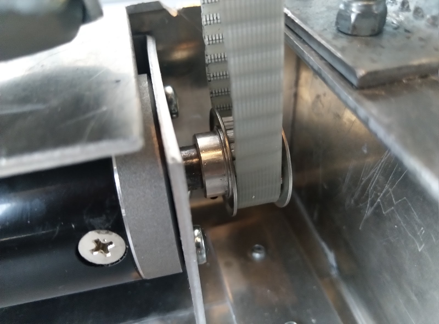
- Remplacement des roulements à brides par un roulement de type linéaire-annulaire.
- Mauvaise fixation des moyeux des roues constatée : les vis n’étaient visées dans rien du tout => 3 tiges filetées de M4 * 75 mm avec rondelles et écrous à frein ont été ajoutées au modèle.
- Agrandissement de l’ouverture dans le châssis pour le passage de la courroie à la scie-sauteuse
- Re-perçage de la base pour fixer la grande équerre support de la roue :
– marquage en plaçant l’ensemble équerres-roue à la bonne place (approximativement)
– pointage et perçage à 5mm.
Même s’il restait encore quelques adaptations à faire, le montage avec les rotules a alors été validé par la chaire, et nous avons pu procéder à la réalisation des autres montages.
Montage des 4 roues
Pendant qu’un de nos membres s’occupait de l’usinage des trois autres axes pour les roues, d’autres se sont occupés de la préparation des supports.
Un problème majeur a alors été détecté : les courroies étaient en diagonale, les nouveaux paliers étant plus épais que les précédents. Nous avons donc décidé d’inverser les engrenages sur les axes moteurs, et d’adapter en épaisseur des cales entre les petites équerres des roues et le palier.
De plus, les supports-moteur restaient problématiques : d’une part, un boulon de fixation de l’équerre sur le châssis poussait directement sur le moteur, ce qui décentrait celui-ci, et détendait la courroie. D’autre part, l’écrou à sertir de réception de ce boulon, était situé au milieu de la plaque-support, et non sur un bord, déséquilibrant ainsi la plaque. Nous avons donc ajouté deux autres écrou à sertir supplémentaires, montant ainsi leur nombre à quatre, et situés aux quatres coins de la plaque. Les fentes sur le chassi pour l’adaptation de hauteur des moteurs ont été allongées en conséquence.
Enfin, pour pallier la mauvaise fixation des moteurs sur ces fentes, ce qui posait problème vis-à-vis de la tensions des courroies, l’adjonction de trois rondelles à chaque écrou (dont une à dentures extérieures) s’est révélée suffisante. À noter, aussi, le positionnement de la clavette pour les roues mecanum sur leurs axes, qui reste difficile et qui nous a posé problème.
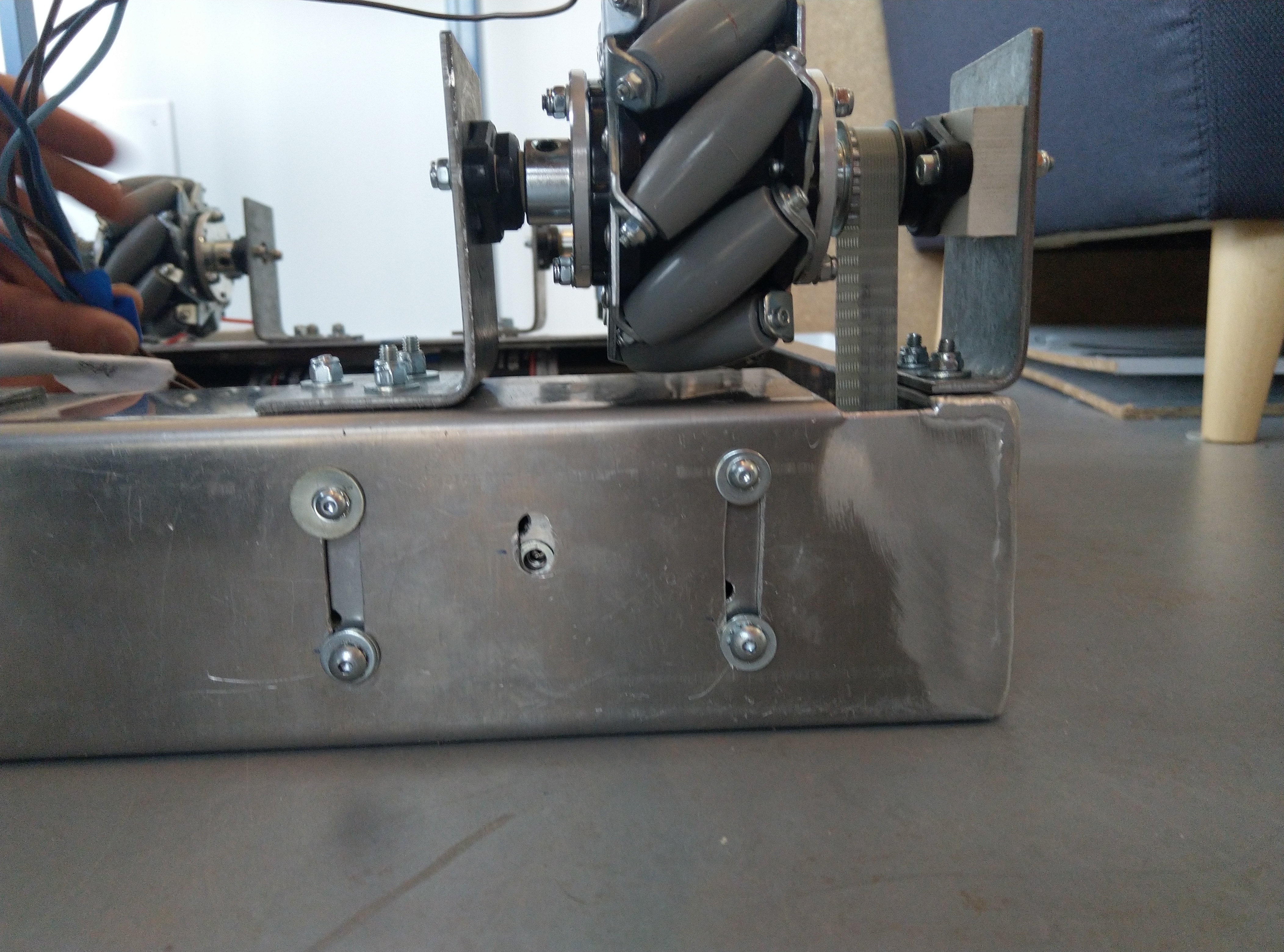
Nous avons alors pu monter séparément les quatres roues avec leurs moteurs, en les alignant deux à deux, à vue (avec une règle), et effectuer les corrections d’alignement, pièce à pièce, car aucun montage n’était identique à un autre : il fallait adapter le modèle à la réalité. Toutes les vis de pression ont également été resserrées avec soin, afin d’éliminer au maximum tous les jeux de mouvement sur les engrenages.
 Le résultat “statique” était déjà concluant, puisque désormais les roues tournées à la main entraînent les moteurs pourtant à fort couple, sans que les courroies ne sautent. Mais nous avons pu procéder à des tests dynamiques.
Le résultat “statique” était déjà concluant, puisque désormais les roues tournées à la main entraînent les moteurs pourtant à fort couple, sans que les courroies ne sautent. Mais nous avons pu procéder à des tests dynamiques.
Vérifications et modifications apportées
 Après branchement de la carte de puissance réalisée lors d’un projet précédent, et connexion d’un IDE Arduino à la celle-ci, le premier essai à vide n’a pas été concluant :
Après branchement de la carte de puissance réalisée lors d’un projet précédent, et connexion d’un IDE Arduino à la celle-ci, le premier essai à vide n’a pas été concluant :
- le déplacement avant/arrière était bon,
- la translation gauche/droite n’était pas excellente,
- la rotation du plateau sur lui-même ne fonctionnait pas du tout, les roues essayant de replier le châssis sur lui-même !
Après analyse, il s’est en fait révélé que les roues mecanum étaient montées à l’envers depuis le début de la construction de la base… Ainsi, au lieu de voir les roulettes du dessous des roues disposées en ‘X’, il fallait les avoir en ‘O’.
Conclusion
Majoritairement déroulé dans l’atelier de fabrication, ce projet nous a fait adapter le modèle de conception au réel : chaque pièce étant unique, cela rendait le travail à fournir et les problèmes à résoudre aussi intéressant que totalement différents d’une roue à une autre.
Pour des passionnés de mécanique et de fabrication, ce projet s’est donc révélé très motivant. De plus nous avons pu apprécier la bonne ambiance que l’évènement a installé au sein de l’école, ainsi que l’engagement des encadrants pour nous aider dans nos réalisations.
Ressources et liens
Code de test Arduino
Ce fichier peut être trouvé dans le dossier se trouvant à l’adresse suivante:
https://drive.google.com/open?id=1HCUQd-cEFMARB2H0DnM9QcvOWuwK77bm
