
Bonjour à tous !
Nous allons vous présenter la conception et mise en oeuvre d’une tête interactive. C’est un projet développé dans le cadre du Projet S4 (P20 : Tête interactive pour le robot Kompaï) en 2émé année à IMT Atlantique.
Contexte
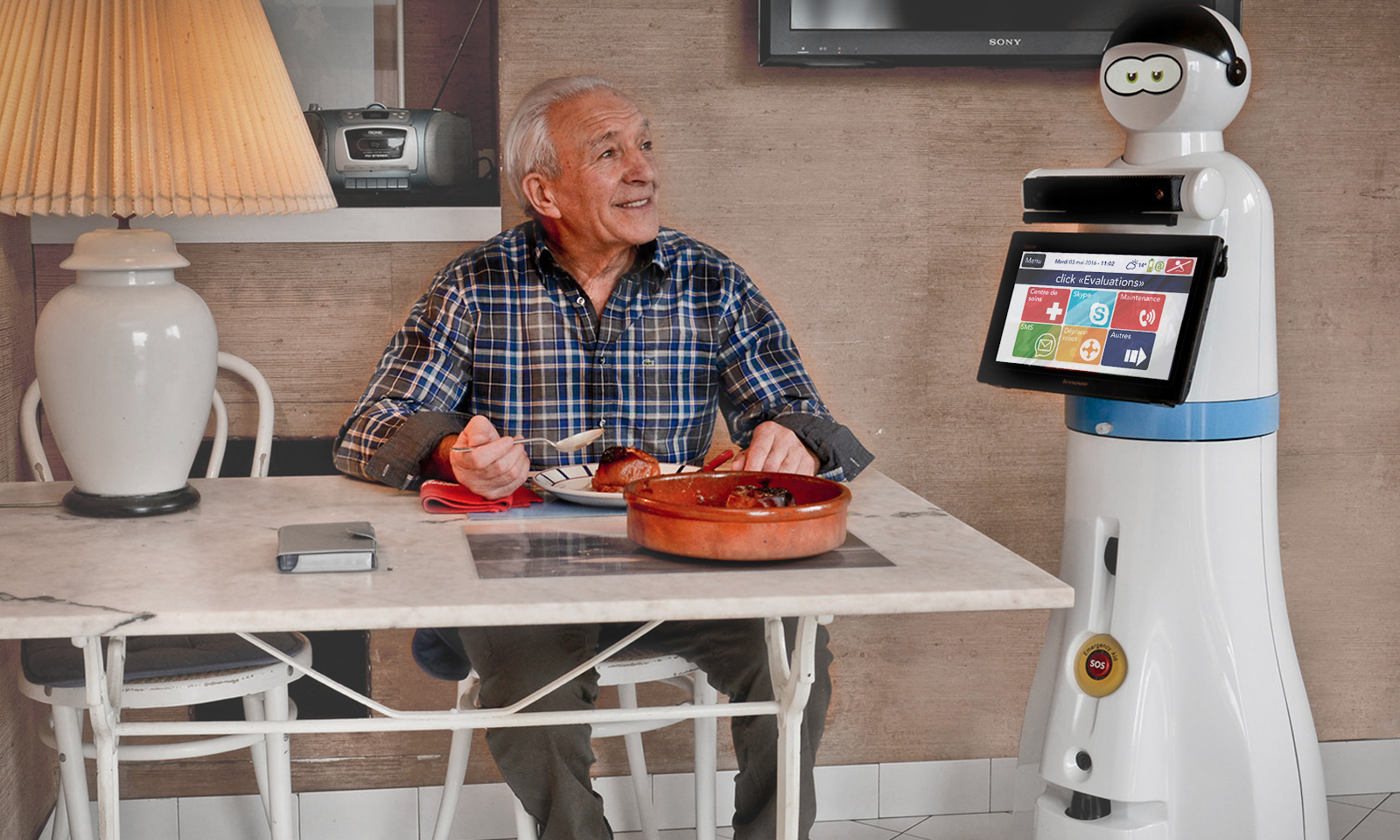
L’entreprise Kompaï Robotics se spécialise dans le développement de solutions robotiques telles que la troisième version de leur robot d’accompagnement Kompaï dédié aux maisons de retraite. Ainsi, l’objectif de ce projet est de réaliser une tête interactive qui communique avec le reste du corps du robot et qui permet d’ajouter de nouvelles fonctionnalités pour rendre l’interaction homme-machine plus conviviale.
Résumé
Le projet consiste en la conception et la mise en œuvre d’un modèle de tête robotique interactive pour Kompaï. L’objectif est mettre en place les fonctionnalités nécessaires à une interaction de qualité avec les soignants et les patients qui utilisent le robot. Les différentes fonctionnalités sont intégrées en utilisant ROS (Robot Operating System, version Kinetic) comme système de connexion dans la carte Raspberry Pi 3 sur Debian Stretch.
Ensuite une vidéo avec la démonstration du prototype présenté au forum de l’école:
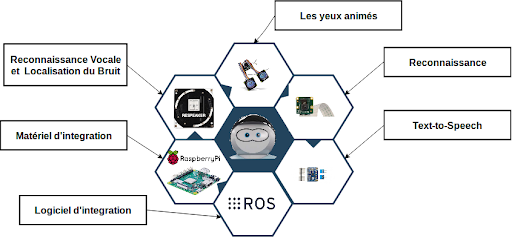
Pour le développement du projet nous avons découpé la tête en différents fonctionnalités, alors nous avons utilisé des parties de logiciel et du matériel aussi.
Matériel
Reconnaissance des images
– (1) Module de Caméra Raspberry Pi V2
Localisation du bruit et Reconnaissance des commandes vocales
– (1) ReSpeaker 4 microphones for Raspberry Pi
Module Yeux animés
– (2) écrans OLED 128×128, 16-bit Color 1.5″ (adafruit)
Text-to-Speech:
(2) Haut-parleur, Mini, Dynamique, 2 W, 8 ohms
(1) Amplificateur audio 2,8 W TPA2016D2
(1) Connecteur jack 3,5mm mâle stéréo
Raspberry Pi 3
Integration

Pour réaliser l’intégration, nous avons tenu compte du fait que le module ReSpeaker utilise le connecteur Raspberry et occupe toutes les broches de la carte, mais utilise uniquement l’alimentation et l’interface I2C. Nous utilisons donc des mini-platines de prototypage et des câbles femelle-femelle pour tout assembler.
Logiciel
Comme nous l’avons déjà dit, la tête peut interagir avec les utilisateurs par des images et du son. Nous avons développé toutes les fonctionnalités séparément en utilisant Python 2.7 comme langage principal. L’intégration des fonctionnalités est une tâche assez complexe car elle implique du temps réel, pour cela nous proposons une structure dans le système d’exploitation ROS qui contrôle chaque fonctionnalité comme des nœuds séparés et les exécute en même temps.
De plus, toutes les données techniques (codes, rapport, tutoriels, …) sont disponibles dans le dépôt qui est remis aux encadrants techniques. [1]
ARIAS Camila, DESUQUE Leandro, IGLESIAS Fernando,
OUALI Maher, PÉREZ Martín Andrés
Projet 20 Tête interactive pour le robot Kompaï
[1] Encadrants
M. Christophe LOHR Département d’Informatique (ET) christophe.lohr@imt-atlantique.fr
Mme Charlotte LANGLAIS Département d’électronique (ET & EGP)
charlotte.langlais@imt-atlantique.fr
Mme Mathilde MENORET Fablab IMT Atlantique (ET)
