
- Sonar DIY : Introduction
- Sonar DIY : Fonctionnement et architecture générale
Un sonar, c’est un dispositif qui se base sur la propagation d’une onde acoustique pour détecter et positionner des objets. Le radar est basé sur le même principe, mais utilise des ondes électromagnétiques. C’est un dispositif qui existe dans la nature : beaucoup d’animaux utilisent un sonar pour se repérer, comme par exemple la chauve-souris ou les dauphins. Dans les sonars artificiels, on distingue les sonars passifs (on écoute seulement les bruits ambiants), et les sonars actifs (on émet un son, puis on écoute le retour du son émis).
Le but n’est pas de faire un cours théorique sur le sonar, mais d’en expliquer grossièrement le fonctionnement et les caractéristiques dans notre cas. Je vais donc m’intéresser uniquement au sonar actif (sous-)marin. Le principe d’un sonar actif est simple : on émet une onde à un instant t connu, puis on mesure l’intensité du signal sonore reçu. Chaque matériau a ses propres caractéristiques de diffraction et de réflexion des ondes sonores, et les éléments présents dans le faisceau d’émission de l’onde sonore vont donc chacun renvoyer une portion plus ou moins grande de l’impulsion vers l’antenne du sonar (en gros, un micro). En mesurant cette puissance du signal reçu en fonction du temps, on peut savoir quels éléments sont présents à quelle distance. En traitant un peu le signal reçu, on peut aussi obtenir d’autres informations, comme par exemple la vitesse de l’élément qui renvoie (avec l’effet Doppler). Un dispositif sonar doit donc être capable d’émettre et de recevoir une onde sonore, et de traiter cette onde.
Un sonar est donc constitué de trois éléments principaux :
- une antenne, qui peut être soit émettrice (comme un haut parleur), soit réceptrice (un micro), soit les deux ;
- un dispositif électronique de réception et d’émission,
- un dispositif de traitement des données et d’affichage.
Je passe sur la partie électronique et traitement de données, qui ne présentent que peu de particularités. C’est un élément standard de toute chaine de transmission, et le sonar ne déroge donc pas à cette règle. Ca ne rend pas ces parties faciles à réaliser cependant, comme on le verra lors de la réalisation ! Je vais détailler dans la suite les caractéristiques de l’antenne.
Lorsqu’on émet une impulsion sonore, on va insonifier (c’est à dire « éclairer » mais avec une onde sonore au lieu de lumière) une zone. La zone insonifiée dépend de facteurs géométriques (forme du faisceau sonore émis), du milieu (vitesse de propagation du son, atténuation) et de facteurs temporels (en particulier, la durée de l’impulsion). Commençons par les contraintes : le milieu. L’eau de mer est un milieu hétérogène, mais l’équation de MacKenzie permet d’obtenir une approximation suffisante pour nos besoins. Vous trouverez un calculateur ici : http://resource.npl.co.uk/acoustics/techguides/soundseawater/. Dans les eaux brestoises, au mois de septembre, on peut tabler sur une température de 18°C en surface, et de 14/15°C à 30m de fond. Si on fait une approximation à 16°C, avec une salinité de 35, et une profondeur (très rarement atteinte !) de 50m, on obtient environ 1510m/s. La température est la variable qui influe le plus sur cette vitesse. Concernant l’atténuation de l’onde dans le milieu, on reste dans du classique : plus la fréquence de l’onde est faible, moins il y a d’atténuation. Par contre, d’après les règles de la diffraction, la pouvoir de résolution d’un sonar est de l’ordre de la longueur d’onde utilisée. Ainsi, plus on diminue la fréquence, plus la résolution diminue. Si on cherchait à trouver des poissons solitaires, ou si on travaillait dans la guerre numérique et la chasse aux mines sous-marines, il nous faudrait une résolution très faible, et on chercherait donc à avoir une fréquence élevée. Cependant, ce n’est pas du tout l’objectif. De plus, comme on le verra, la réalisation d’une antenne sonar est relativement complexe sans les moyens adéquats, et notre antenne sera donc forcément un peu limitée. On va donc chercher à minimiser l’atténuation plutot que de travailler sur la résolution. Ceci a également l’avantage de nous faire travailler sur des fréquences faibles (< 100kHz), plus faciles à manipuler en électronique. En l’occurrence, on choisira une fréquence de l’ordre de 25kHz pour des raisons pratiques que je détaillerai dans une partie suivante.
Maintenant qu’on a nos contraintes, voyons sur quoi on peut influer. On se place dans le cas idéal, dans lequel on peut réaliser n’importe quelle antenne. La forme géométrique du faisceau sonore est l’élément crucial lors de la conception de l’antenne. Il existe différentes configurations d’utilisation d’un sonar. Par exemple, un sondeur bathymétrique est en fait un sonar, qui envoie une onde sonore étroite directement vers le fond, et qui compte le temps nécessaire pour le retour, ce qui donne la profondeur. Il faut une onde étroite, afin d’éviter d’avoir trop de reliefs à l’intérieur de la zone insonifiée, mais cette contrainte n’est pas forte. Une faisceau en cône est tout à fait satisfaisant.
Il existe d’autres types de systèmes sonars. Par exemple, on peut positionner plusieurs antennes fixes sur des bouées dans une zone que l’on veut couvrir. Puis, on émet un (ou plusieurs) bruit(s) depuis un endroit connu, et on traite les données reçues sur chacune des antennes pour « cartographier » la zone. Dans ce cas, il n’y a que des antennes de réception, qui peuvent avoir un angle d’ouverture très large. Dans notre cas, un tel système est trop complexe à mettre en œuvre, mais il est pratique pour des systèmes de détection destinés à rester en place. Dans un système plus portable, le problème est de couvrir une large zone. On va donc utiliser un bateau qui déplacera l’antenne. En répétant des mesures le long du déplacement, on pourra également cartographier une zone sans avoir besoin de plusieurs antennes de réception. Dans ce cas, la zone insonifiée doit être la plus grande possible, mais également la plus fine possible. En effet, si le faisceau est trop large, on saura qu’il y a un objet à une distance connue, mais cet objet sera sur un arc de cercle, on ne pourra pas le positionner en deux dimensions. Par contre, il faut balayer une grande largeur autour du sonar. Un faisceau en cône ne convient donc pas, il va falloir une forme de pyramide très large sur le côté perpendiculaire au déplacement (altitude), et très étroit sur l’autre côté (azimut).
Afin de se débarrasser des problèmes liés aux mouvements du bateau et à la thermocline (changement brutal de température, qui réfléchit les ondes sonores), on va utiliser un sonar à balayage latéral (side scan sonar). Un tel sonar utilise un engin tracté (« towfish ») que j’appellerai poisson ou poisson tracté par la suite. L’antenne est installée sur le poisson, qui est tracté sous l’eau par le bateau. Le long du cable de tractage, on fait également passer les données reçues. Il est également possible de refaire ce travail sur un sonar embarqué sur le bateau.
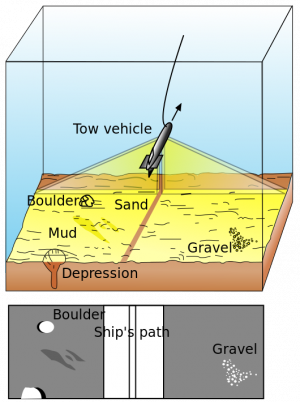
Image issue de Wikipedia
Un schéma d’un sonar à balayage latéral est présenté dans l’image précédente, issue de Wikipedia. L’antenne est sur le poisson. Le faisceau idéal pour un transducteur de ce type est un faisceau rectangulaire. L’angle d’azimuth est très étroit (idéalement, 1° ou moins), et l’angle de l’altitude est large, idéalement 30° de chaque côté dans des eaux peu profondes. On trouve des antennes performantes à un prix abordable chez Garmin ou Humminbird, cependant les spécifications ne sont pas disponibles et ces antennes ne fonctionnent qu’avec l’électronique associée. On va donc construire notre propre antenne (ou transducteur).
Etant donnée la solution adoptée, il y a quatre grosses parties à concevoir et construire pour le sonar :
- le transducteur (et son poisson)
- la partie électronique de transmission, qui sera principalement analogique
- la partie traitement du signal
- l’affichage et le stockage des résultats du sonar
Les deux dernières parties seront numériques, il faudra donc aussi réaliser une interface analogique/numérique. Dans le prochain article, je commencerai à présenter la solution utilisée pour l’antenne.

bonjours.
Sujet trés interessant. Je voulais savoir si vous avez avancé.
merci
Oui
Ha quoul ssa va médé pourre lait tais pet eux
Je peux voir la suite où s’il vous plaît