
Dans le cadre de l’inter-semestre «Fablab ou comment concevoir à peu près tout…» j’ai souhaité réaliser un projet sur un sujet qui me passionne: l’ Airsoft. Tout d’abord, l’ Airsoft est un jeu de rôle mêlant stratégie et tactique qui ressemble au Paintball, et dans lequel les joueurs utilisent des répliques d’armes à feu qui tirent des billes en plastique de 6mm de diamètre. Je me suis donc penché sur l’élaboration d’une tourelle d’ Airsoft, un genre de drone fixe. Durant la semaine d’intersemestre, j’ai réalisé une commande d’un moteur à courant continue à distance grâce à des Arduino. Ce moteur devait servir à assurer la rotation autour de l’axe vertical.
Matériel Nécéssaire:
- 2 Arduinos UNO
- 2 shield XBee
- 1 joystick
- 1 breadboard
- 1 pont en H LMD18200
- 1 moteur à courant continue
- 1 batterie 9V
Montage Électronique:
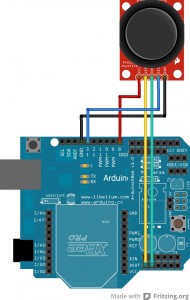
- La manette:
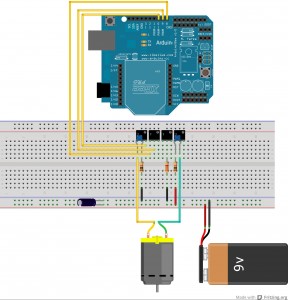
- Le contrôleur
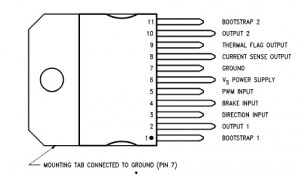
Le pont en H:
Le fonctionnement:
La manette capte la position des deux axes du joystick et du bouton intégré. Il envoie ensuite ces informations via le module XBee. Par contre il n’est possible de n’envoyer que des variable au format d’un CHAR id est sur un octet. Il faut donc adapter l’information au préalable. La manette envoie aussi un symbole ( 255) entre chaque cycle afin d’assurer la synchronisation. Il faut bien sûr s’assurer que ce symbole n’est jamais utilisé à d’autres fins.
Le contrôleur met le pin correspondant à l’entrée direction du pont en H au niveau haut ou bas en fonction de l’information reçue. Ensuite il applique une tension analogique sur l’entrée » PWB input » qui est fonction de la position du joystick. (J’ai eu quelques bug que je n’ai pas eu le temps de corriger sur ce montage, il est possible qu’il faille envoyer un signal créneau en faisant varier le rapport cyclique en fonction de la position du joystick pour que ça marche mieux.)
La partie Mécanique:
Ce projet contient aussi une partie mécanique. La propulsion des billes devait se faire à l’aide de pièces récupérée sur une vielle réplique électrique. J’ai réalisé la structure de la tourelle en bois.

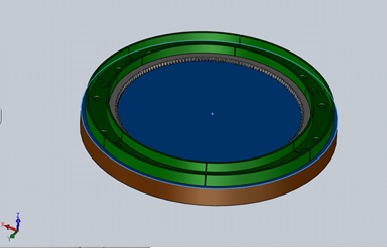
J’ai aussi commencé à réaliser des modèles 3D sous Solidworks pour assurer la mobilité autour de l’axe vertical. Il s’agit d’un rail qui va guider des roue et d’une crémaillère. Ces pièces sont destinées à être imprimées par l’imprimante 3D du Téléfab.
Suite du projet:
L’objectif final du projet est de réaliser une tourelle autonome qui pourra être guidée à distance via un smartphone. Disposant d’un Raspberry Pi, je compte refaire la partie logicielle en Python en utilisant les connecteurs GPIO du Raspberry. Il me faudra ensuite réaliser l’interface Android pour guider la tourelle. Je compte aussi mettre une webcam afin de renvoyer la vidéo sur le smartphone. Il faut aussi que je finalise les différentes pièces sous Solidworks, que je les imprimes et que je monte le tout. Enfin il me restera encore beaucoup de boulot pour automatiser le tout. Donc si ça vous intéresse de contribuer au projet, n’hésitez pas! 😉
