
- Recherche documentaire sur la TRACABILITE DES VETEMENTS DANS L’INDUSTRIE DU TEXTILE
- Traçabilité des vêtements : Enquête terrain, données recueillies et Persona
- Projet CoOC : Robot de suivi automatique des stocks
Equipe:
- Apia Moya
- Hoang Duong
- Tanguy De Lanversin
I. Contexte:
L’industrie textile s’est transformée depuis quelques décennies. Innovations, scandales, nouvelles collections de sandales se succèdent à un rythme toujours plus rapide, fast fashion oblige! Une innovation particulière qui conquiert des parts de marché toujours plus nombreuses a particulièrement retenue notre attention: la RFID. Les étiquettes RFID ont peu à peu trouvé leur place dans le magasins, elles permettent de superviser les stocks plus facilement et rapidement, d’avoir une meilleure traçabilité sur les produits (provenance, authenticité…) et tout cela à des prix qui ne font que diminuer.
Dans le cadre de notre projet CoOC de 2e année, nous avons donc réalisé un objet communicant en lien avec cette technologie RFID, répondant à un besoin concret de l’industrie textile. Nos enquêtes terrains nous ont en effet menées sur un sujet que l’on ne pensait pas aborder: la gestion des stocks. En interrogeant des salariés de magasins de vêtements et notamment suite à une entrevue avec une responsable de rayon chez Decathlon, nous nous sommes aperçus que tout le potentiel des étiquettes RFID n’était pas encore pleinement exploité. Aujourd’hui les salariés vont encore dans les rayons et les réserves pour scanner manuellement à l’aide d’une raquette RFID les produits en stock. C’est ce constat qui nous a poussé à réfléchir à une manière innovante, fiable et précise de gérer les stocks.
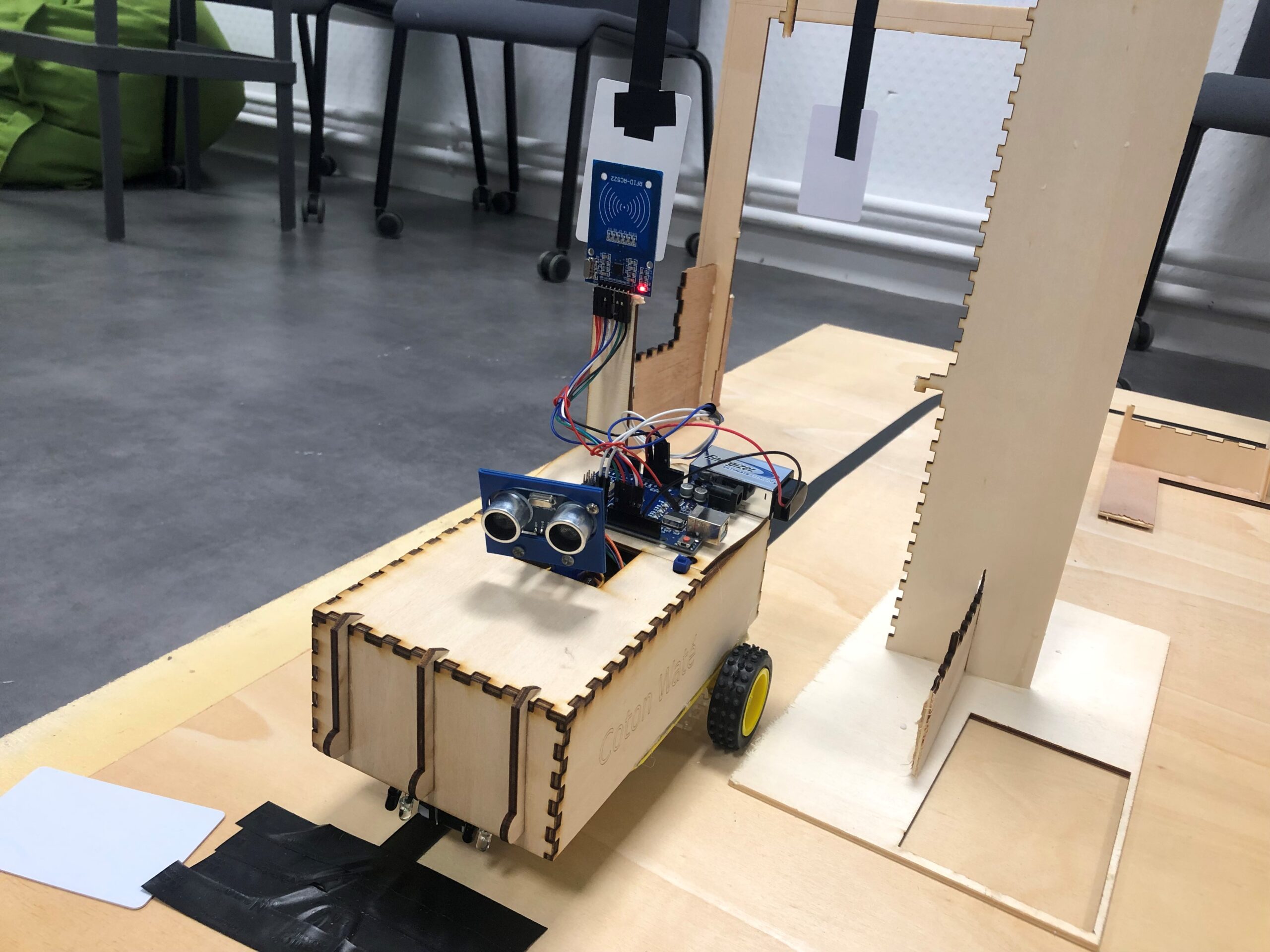
Nous avons alors conçu un robot capable de suivre un chemin prédéfini (ici une bande au sol) pour parcourir des rayons, une réserve, un entrepôt tout en scannant les étiquettes RFID à proximité pour alimenter et mettre à jour la base de données où figurent les stocks de l’entreprise. Ce suivi automatisé des stocks permettraient d’éliminer la tâche rébarbative de scan et mise à jour des stocks pour les opérateurs, leur permettant ainsi de consacrer plus de temps sur le terrain pour conseiller les clients, arranger les rayons ou contribuer à d’autres tâches moins ingrates.
Dans l’industrie textile, les entreprises utilisent très majoritairement des étiquettes équipées d’antennes RFID UHF passives, cette technologie alliant robustesse, finesse et surtout une capacité de détection de l’ordre de plusieurs mètres (selon la puissance du lecteur). Pénurie de composants oblige, nous n’avons pu travailler sur du RFID UHF et nous sommes donc tournés vers du RFID NFC dont le matériel était disponible au fablab de l’école.
II. Notre robot en détails
A. Vidéo explicative du fonctionnement du robot | Mise en situation
B. Construction de la coque
Nous avons décidé de concevoir la coque du robot à l’aide de la découpe laser du fablab. Certaines parties avaient été designées avec Tinkercad pour être imprimées en 3D (charnières) mais les délais pour imprimer en 3D étaient trop longs à cause d’une forte demande de la part des élèves. Nous avons donc construit toute la coque en contreplaqué avec la découpe laser, nous avons utilisé des serre-joints pour les pièces mobiles.
La coque se devait d’être suffisamment rigide pour résister à des chocs minimes et pour maintenir certains composants électroniques bien en place. Certaines parties de la coque s’emboîtaient, d’autres nécessitaient d’utiliser de la colle à bois (pour renforcer la liaison ou maintenir 2 surfaces lisses ensembles)
La découpe laser est une Rayjet Trotec pilotée par le logiciel Corel Draw 2018. La coque a été conçue avec le logiciel Inkscape (version 1.1), le fichier a été exporté au format SVG pour la découpe.
Les lignes doivent respecter ces propriétés pour préparer les fichiers de dessin [1]:
- Découpe: tracer des lignes rouges (épaisseur: Ligne Très fine ou 0,05mm / rouge pur RGB 255;0;0)
- Gravure: Formes/Lignes/Dessins (vectorisés de préférence) en noir ou en niveau de gris.
La taille du plateau de la Rayjet (donc de découpe max) : 457 x 305 mm
Les dessins de la coque et des charnières ont été déposés sur un drive ouvert à tous avec le lien suivant: https://drive.google.com/drive/folders/1_IyIeHGhq1p6IS1zDbmX_LJn9qIRJx86?usp=share_link
C. Diagramme d’architecture matérielle/logicielle:
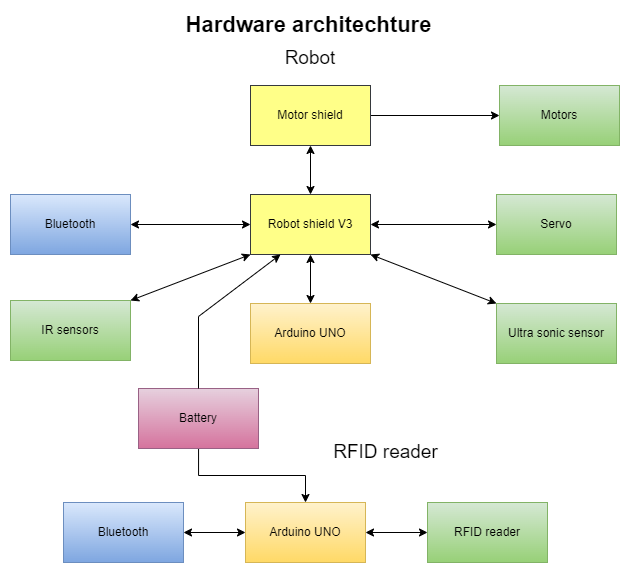
D’architecture matérielle
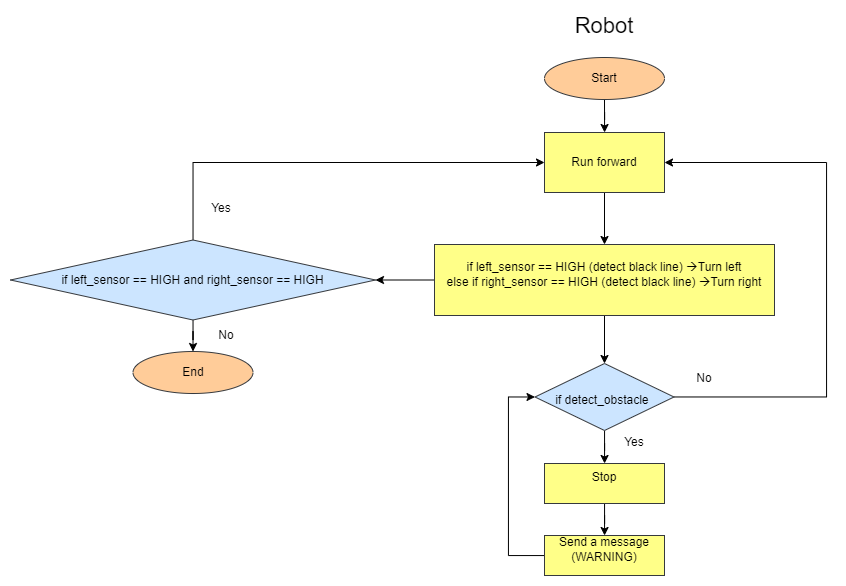
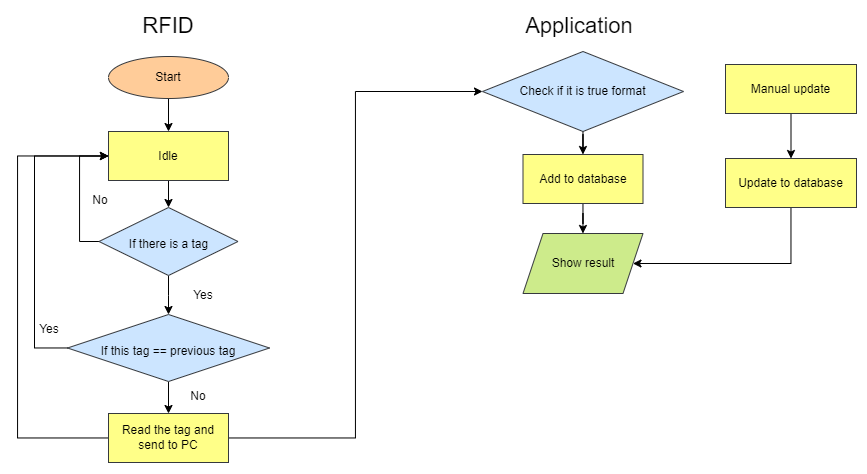
Organigramme du Robot, RFID et Application
D. Matériel utilisé et montage électronique
Liste des matériels:
- 2 arduino UNO, 1 shield I/O (Basic IO shield), 1 shield de moteur (Rotoshield Motor Driver Shield for Arduino)
- 2 capteurs IR : MH FC-51 (Breakout Receiver IR)
- 1 capteur ultrasons : HC-SR04
- 2 modules Bluetooth HC-05 (Silver Mate Bluetooth)
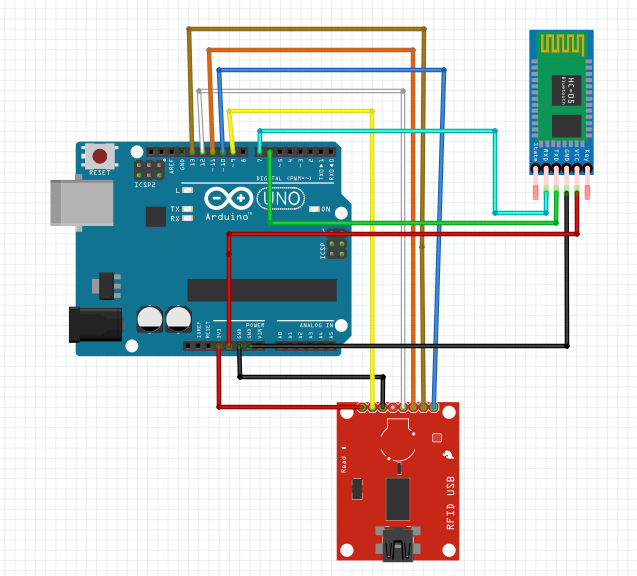
- 1 lecture RFID : RC522
- 1 servomoteur
- batterie 9V, 4 pilles 1.5V
Le schéma de robot: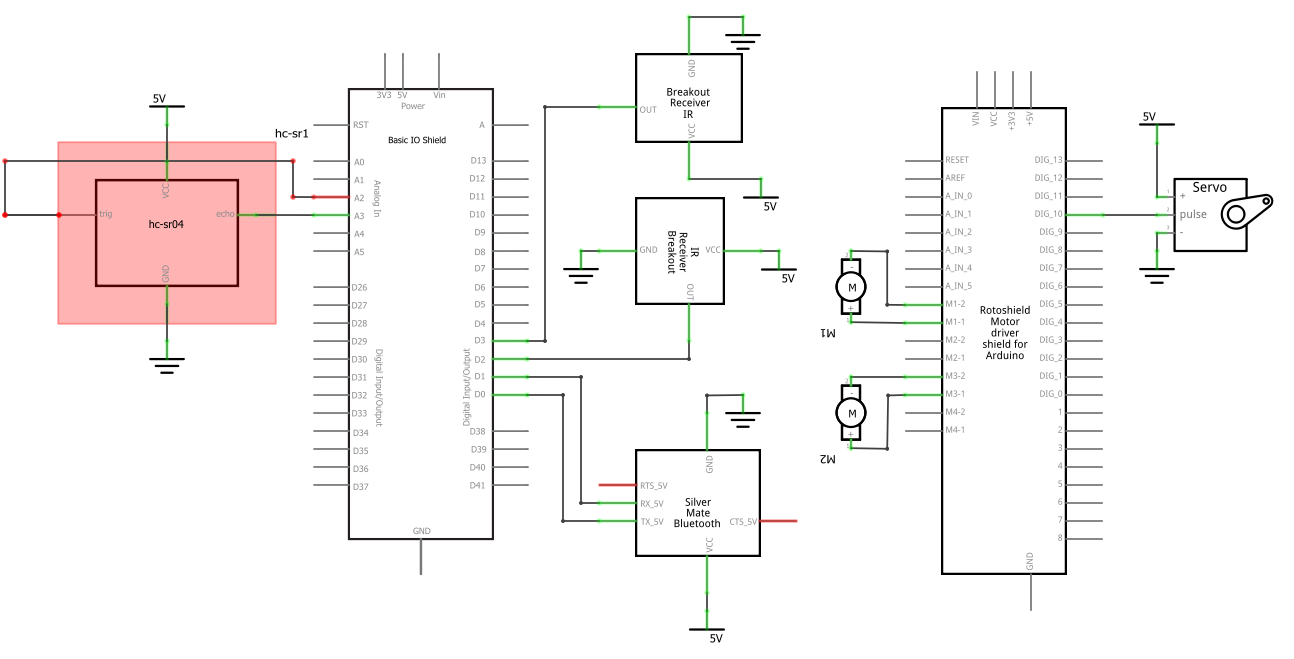
En fait, on a combiné 3 cartes: Arduino + I/O Shield (Augmenter des ports) + Motor Shield.
Le schéma de RFID lecture:

E. Plus informations sur Github: le lien de Github inclut le code source
III. Perspectives:
Nous avons pu identifier plusieurs perspectives d’amélioration de notre prototype:
- Monter et adapter un lecteur RFID UHF à notre robot pour envisager des tests à plus grande échelle sur le terrain
- Améliorer l’autonomie du robot et monter un système de batterie rechargeable plutôt que de changer les piles. Il est important de noter qu’en passant sur une technologie RFID UHF, le robot aura besoin de bien plus de puissance pour fonctionner, il faudra sans doute redimensionner toute l’alimentation du robot.
- Alimenter la base de données où figure nos stocks en passant pas un réseau wifi (et non une antenne bluetooth) pour augmenter la portée et pouvoir déployer le robot dans des magasins, entrepôts pouvant atteindre plusieurs milliers de mètres carrés de surface au sol
- Simplifier l’architecture électronique du robot, nous avons utilisé 2 cartes Arduino, 2 modules bluetooth pour des raisons pratiques de développement. On pourrait supprimer certains composants redondants pour réaliser une nouvelle architecture plus sobre et efficiente.
Références:
[1]Telefab IMT Atlantique : https://telefab.fr/les-machines/decoupe-laser/
[2]Guidage RFID: https://www.electronique-mixte.fr/microcontrolleurs/rfid-controle-dacces-par-badge-avec-arduino/
[3]Building an easy Line Follower Robot using Arduino UNO: https://circuitdigest.com/microcontroller-projects/arduino-uno-line-follower-robot
[4]A line follower robot from design to implementation: Technical issues and problems: https://www.researchgate.net/publication/224132741_A_line_follower_robot_from_design_to_implementation_Technical_issues_and_problems
[5]Designing and Building a Line Following Robot: https://www.cs.york.ac.uk/micromouse/Papers/Building-a-line-following-robot.pdf
[6]Line Follower and Obstacle Avoiding Robot: https://create.arduino.cc/projecthub/embeddedlab786/line-follower-and-obstacle-avoiding-robot-baa2bb
Lien de la vidéo explicative du fonctionnement de notre robot: https://www.canva.com/design/DAFU3gN9cAY/KLp6XCv7cG02qRxa4Pgxzg/watch?utm_content=DAFU3gN9cAY&utm_campaign=designshare&utm_medium=link&utm_source=publishsharelink
Lien du code git: le lien de Github inclut le code source
Lien du drive contenant les dessins de la coque et des charnières: https://drive.google.com/drive/folders/1_IyIeHGhq1p6IS1zDbmX_LJn9qIRJx86?usp=share_link
