
Nous sommes trois étudiants en FISE A1 et dans le cadre de notre projet CODEV, nous avons collaboré avec le club de robotique d’IMT Atlantique en vue de sa participation à l’édition 2021 de la Coupe de France de robotique qui se déroulera début juillet. Notre projet s’est donc inscrit donc dans un projet plus large, celui d’engranger le plus de points possible lors de l’édition 2021 de la compétition et de remettre en place les bases techniques et matérielles qui seront utiles lors des éditions futures de la coupe.
Le déroulement d’un match de la Coupe de France de robotique peut se résumer de la façon suivante : deux équipes s’affrontent en plaçant un ou deux robots (et parfois des systèmes électroniques secondaires) sur une aire de jeu afin d’engranger un maximum de points en 100 secondes.

Aire de jeu de l’édition 2021 de la coupe
Notre travail s’est concentré sur la conception et la fabrication du phare, un système annexe au robot principal de l’équipe qui peut rapporter jusqu’à 15 points sur les 93 points disponibles au maximum (sans compter les bonus). Le phare doit être placé par l’équipe dans une zone de l’aire de jeu appelée “zone rocheuse” et doit être allumé au cours du match par un système impliquant un contact physique avec un des robots de l’équipe. Une fois allumé, il doit se déployer et allumer une source lumineuse avec balayage pour signaler la zone rocheuse. Ce système est également soumis à de nombreuses contraintes (dictées par le règlement de la coupe[1]) portant sur ses dimensions, son amplitude de déploiement, son système d’éclairage ou encore son alimentation. Cependant, nous étions très libres au niveau du choix de la méthode de déploiement du phare. Le déploiement doit être déclenché par une action physique du phare, cependant il peut mettre en jeu un système purement mécanique (par exemple un système de ressorts) ou un ensemble mécatronique plus complexe. Au vu du temps nous étant accordé pour travailler sur ce projet, nous avons choisi de concevoir un phare basé sur un système mécatronique. La conception de ce type de système est particulièrement complexe, mais permet l’acquisition de compétences en électronique, en informatique mais également en mécanique, un sujet peu abordé en première année dans notre filière.
Notre travail s’est donc décomposé selon les étapes suivantes : nous avons tout d’abord longuement réfléchi sur la technologie de déploiement du phare, pour finalement aboutir à un mécanisme d’élévateur en ciseaux. La modélisation 3D du système à l’aide du logiciel de modélisation 3D Autodesk Inventor nous a ensuite permis de dimensionner les différentes pièces et de valider de façon théorique certaines performances du phare.
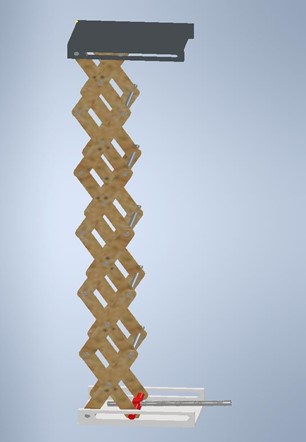
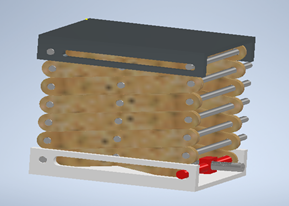
Modèle 3D
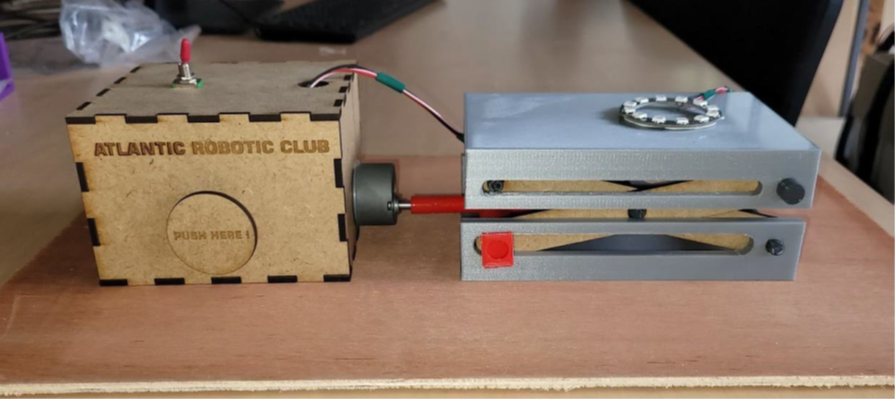
Après avoir obtenu un modèle 3D satisfaisant, il était nécessaire de réaliser un premier prototype d’un étage à l’aide d’une découpe laser et d’impressions 3D. Ce premier prototype a permis de souligner les défauts de notre modélisation en vue d’une amélioration de notre prototype. Finalement, nous avons pu fabriquer un prototype mécanique fonctionnel respectant la majorité des contraintes.

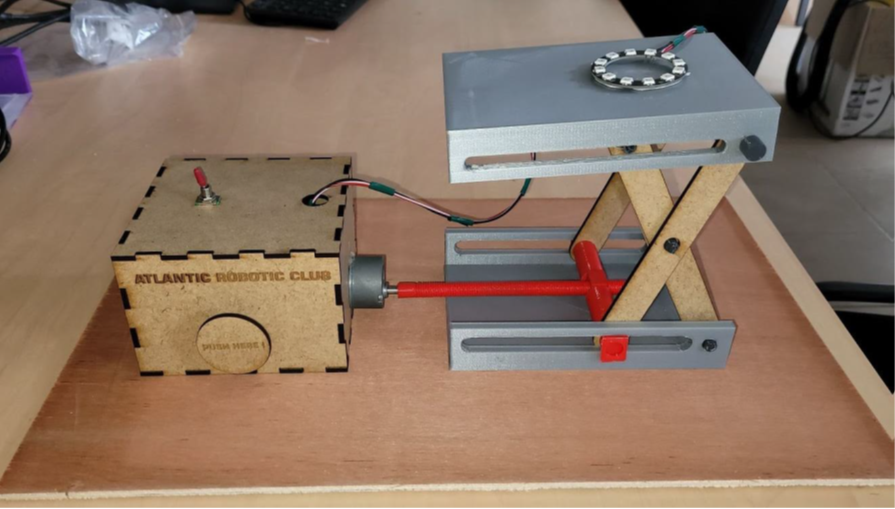
Prototype mécanique
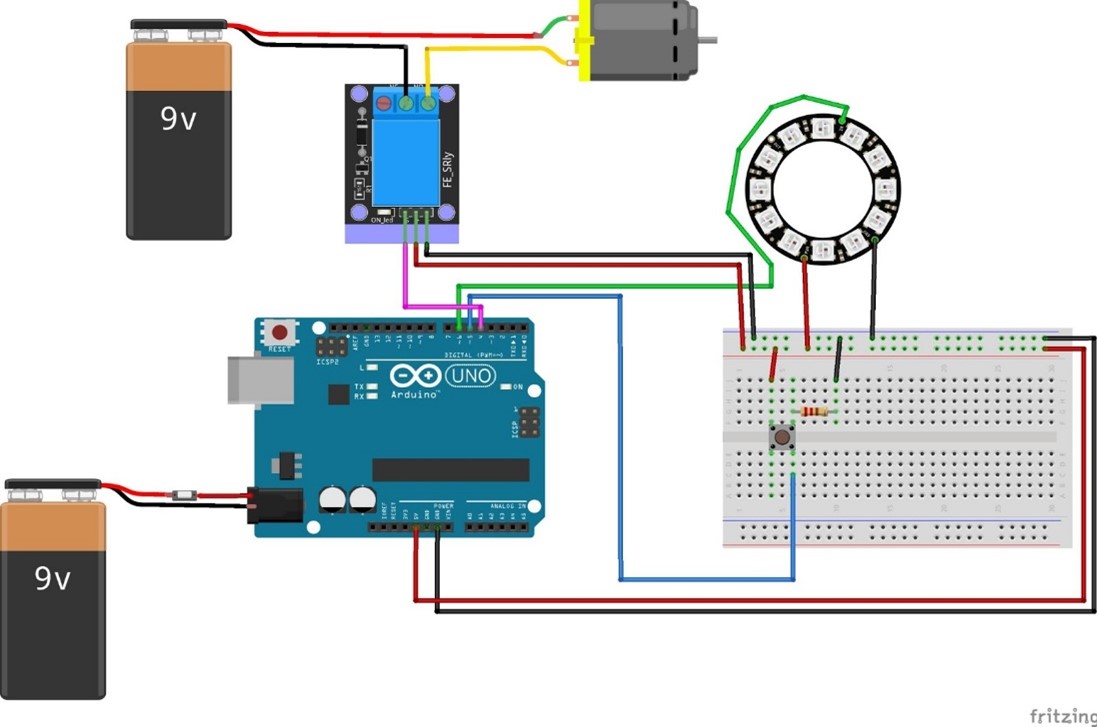
Il ne nous restait donc plus qu’à mettre ce prototype en mouvement à l’aide du circuit électronique suivant, piloté par une carte Arduino Uno.
Voici donc le système final, dont nous sommes assez satisfaits car il respecte la majorité des contraintes fixées par le cahier des charges :
Au repos
Après déploiement
Il existe cependant certaines perspectives d’amélioration, avec notamment l’ajout d’étages supplémentaires au système (un étage correspondant à un « X » du système élévateur à ciseaux), l’ajout d’un pont en H permettant de contrôler la descente du phare et enfin la réduction des jeux de liaisons.
Nicolas Aïdoune, Yao-Hua Xu et Mouna Wamra.
