
Bonjour à tous !
De nombreuses recherches dans la robotique s’orientent de nos jours vers l’aide de l’humain, afin d’aider ce dernier à faire des tâches pénibles à effectuer. Ce domaine s’intitule la cobotique, mot formé de l’association des mots “collaboration” et “robotique”.
Notre projet de Conception et Développement (CODEV) trouve sa place dans la cobotique. En effet, nous avons développé une orthèse qui détecte les mouvements du bras d’un individu pour les faire reproduire par le fameux robot Poppy. Comme une vidéo vaut mieux qu’un long discours, démarrons par une petite vidéo de présentation du fonctionnement du système, disponible en cliquant sur le lien ci-dessous :
Orthèse permettant la détection et le mouvement robot
Les objectifs du projet ont été les suivants :
[1] Identifier les mouvements d’un bras humain rendus possibles par les articulations de l’épaule, du coude et du poignet.
[2] Capter efficacement les mouvements identifiés à l’aide d’une structure adaptée.
[3] Communiquer ces mouvements à Poppy pour qu’il puisse les reproduire en temps réel.
[1] Nous nous sommes concentrés sur les mouvements de flexion et d’extension des articulations de l’épaule et du coude (Figure 1) puis du poignet (Figure 2). Nous avons omis les autres mouvements qui seront l’objet d’une étude ultérieure. Ces mouvements sont des mouvements de rotation dans le plan sagittal.

Figure 1 : Mouvements de flexion et d’extension de l’épaule (gauche) et du coude (à droite) – Source : Sci-Sport.com
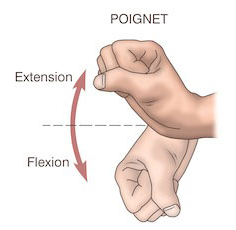
Figure 2 : Mouvements de flexion et d’extension du poignet – Source : https://therapiemiroir.com

Figure 4 : MPU9150 dans son socle – Source : Groupe CODEV 65
[2] Les mouvements de flexion et d’extension présentés ci-dessus sont détectés à l’aide de trois accéléromètres MPU9150 disposés dans des socles (Figure 4), et placés sur le porteur de l’orthèse. Un accéléromètre mesure l’angle entre la pesanteur et un axe qui lui est propre. Nous avons mesuré des angles entre les différents accéléromètres.
Les socles pour les accéléromètres ont été modélisés puis imprimés grâce à l’imprimante 3D disponible au Fablab.

Figure 4 : Poppy, robot humanoïde bio-inspiré – Source : fr.wikipedia.org
[3] Les angles mesurés sont ensuite communiqués au robot Poppy. Le robot humanoïde Poppy présenté sur la Figure 4 est né en 2012 d’un projet appelé Poppy Project dans l’un des laboratoires de INRIA Bordeaux Sud-Ouest, au cours de la thèse de Matthieu Lapeyre. L’objectif de cette thèse était à l’origine d’explorer le rôle de l’incarnation et des propriétés morphologiques sur la cognition et en particulier l’apprentissage de tâches sensorimotrices.
Ce robot est au cœur d’un projet open-source auquel n’importe quel individu peut apporter des données, que ce soit des points de vues, des idées ou des travaux. Deux exemplaires de ce robot Poppy sont disponibles à l’IMT Atlantique, au département IHSEV.
Cependant, le robot Poppy n’est pas à l’origine doté d’une articulation du poignet (Figure 5). Nous avons donc dû la fabriquer puis la fixer. Les pièces ont été imprimées grâce à l’imprimante 3D du Fablab. Vous trouverez ci-dessous un timelapse de l’impression des mains de Poppy en cliquant sur le lien ci-dessous :
Timelapse de l’impression 3D des mains de Poppy

Figure 5 : Bras de Poppy modifié (gris) et bras de Poppy d’origine (blanc) – Source : Projet CODEV 65
Ainsi, notre projet propose une solution technique pour la détection de certains mouvements d’un bras humain et le pilotage du robot Poppy. Il pourra être repris ultérieurement pour ajouter les mouvements manquants afin de couvrir l’ensemble des mouvements rendus possibles par les articulations de l’épaule, du coude et du poignet. De plus, toutes les données techniques (codes, rapport, etc.) seront bientôt disponibles sur un Wiki-Robot.
GUILBAUD Loan, KERMABON Hugo, SCHNEIDER Gilles, TSCHUDY Florian
Projet CODEV Orthèse permettant la détection et le mouvement robot
