
Bonjour à tous,
Voici le premier article d’une longue série sur le projet quadcoptère dont je suis l’un des collaborateurs. À mes côtés se trouvent Quentin Gilladin, Aymeric Legal et Hugo Chauvary. Ce projet nous est fourni par un ancien collègue de Quentin ainsi que quelques pièces pour fabriquer un objet volant basé sur ce qui se trouve sur le site www.aeroquad.com.
Pour cela, il nous a fourni les composants nécessaires à la réalisation de cet quadcoptère. Nous avons donc à notre disposition le matériel suivant :
– une carte de contrôle Arduino Duelmilanove ou une UNO (site officiel : http://arduino.cc)
– un shield Aeroquad v1.8 qui comprend :
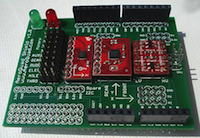
– un accéléromètre qui a pour fonction de fournir les accélérations suivants les 3 axes que fera notre super quadcoptère

Photo non contractuelle
– un gyroscope qui a pour fonction de fournir les rotations suivants les 3 axes effectuées par notre super quadcoptère

– un convertisseur de niveau logique
– Quatre « ESC » Turnigy Plush 18A qui sont des contrôleurs de vitesse électroniques

– Quatre moteurs électriques Tunigy TR2217/16

– Quatre hélices composites 12×3.8 (deux à pas à droite et deux à pas à gauche)

– une batterie au lithium ZIPPY 4000mAh 11.1V

Photo non contractuelle
Le but de notre projet est non seulement d’arriver à fabriquer un quadcoptère qui décolle et se déplace correctement, mais aussi de permettre à celui-ci d’embarquer du matériel pour rendre le vol plus ludique ou plus utile. La finalité serait de pouvoir prendre des clichés ou des vidéos à distance ou encore des capteurs diverses et variés pour prendre des relevés couplables avec les informations fournies par le quadcoptère lui même.
Vous l’aurez peut-être remarqué, mais parmi le matériel fourni, il n’y a pas de structure pour le quadcoptère. La modélisation et la fabrication de celle-ci nous échoie donc. Pour ce qui est de la modélisation, elle a été effectuée à l’aide d’un logiciel de DAO et pour ce qui est de la fabrication, c’est la section mécanique de Télécom Bretagne qui nous fournira des pièces en aluminium.
Nous écrirons sur ce site pour vous tenir au courant de nos problèmes rencontrés, de nos réussites improbables, et de toutes les petites astuces qui seront nécessaire à la réussite de votre propre quadcoptère. Nous espérons que cela vous permettra d’éviter de commettre des erreurs similaires aux nôtres.
Semaine après semaine, nous tiendrons donc à jour ce site pour vous fournir nos dernières avancées.
À très bientôt,
Maxime Lasserre
