
Présentation du projet
Dans le cadre de la réforme de l’enseignement qui aura lieu l’an prochain à Télécom Bretagne, il nous a été demandé de construire un robot qui pourrait fonctionner non seulement en mode autonome mais aussi en mode pilotable par Smartphone et ce dans le but d’une course (course à obstacles, course en ligne droite,…). Ce projet remplacera le projet Découverte auquel les nouveaux étudiants de l’école sont confrontés au semestre 1.
Cela nécessitait donc des informations précises sur la faisabilité, les compétences
requises, le coût des équipements ainsi que les temps de développement. La contrainte de coût était par ailleurs très importante sachant que l’école paiera les équipements pour tous les groupes d’élèves l’an prochain, soit 16 groupes environ.
Matériel utilisé
1 Magician Châssis
2 moteurs Dual Motor Shield DRV8835
1 module Arduino Uno
1 carte mère Pololu DRV8835 Dual Motor Driver Shield for Arduino
1 capteur ultrason
1 servomoteur
1 module Bluetooth
Compétences
Pour mener à bien ce projet, il n’est pas nécessaire d’avoir des connaissances énormes en programmation. Il faut faire un travail de recherches assez important sur le matériel mis à disposition : moteurs, carte mère, capteurs, liaison sans fil, module Bluetooth,… Néanmoins, quelques connaissances en algorithmique, en électronique (pour le montage du circuit du robot) ainsi qu’en matière de logiciels de modélisation 3D comme SolidWorks ou Blender peuvent s’avérer très utiles.
Réalisation
Nous avons commencé par réaliser le mode autonome du robot. Il nous a fallu implémenter des fonctions de déplacement notamment pour avancer, reculer, tourner à droite ou à gauche, s’arrêter ainsi qu’une fonction pour détecter les obstacles et une autre de décision quant à l’obstacle détecté. Pendant tout le développement, nous avons procédé à de multiples tests pour ajuster la vitesse du robot ou encore les différents délais.
Nous nous sommes ensuite attaqués à la partie pilotable par Smartphone que nous avons réalisé avec MIT AppInventor 2. La solution proposée est l’utilisation de chaînes de caractères encodées en UTF-8 qui sont échangées entre l’Arduino et le smartphone Android grâce au module Bluetooth.
Puis nous avons conçu le modèle de la coque du robot avec SolidWorks. Mais nous n’avons malheureusement pas eu le temps de la construire avec l’imprimante 3D.
Code Arduino
Pour ce code nous avons utilisé les bibliothèques DRV8835MotorShield.h, Ultrasonic.h, ServoTimer2.h qui sont respectivement liées aux moteurs, au capteur ultrason et au servomoteur.
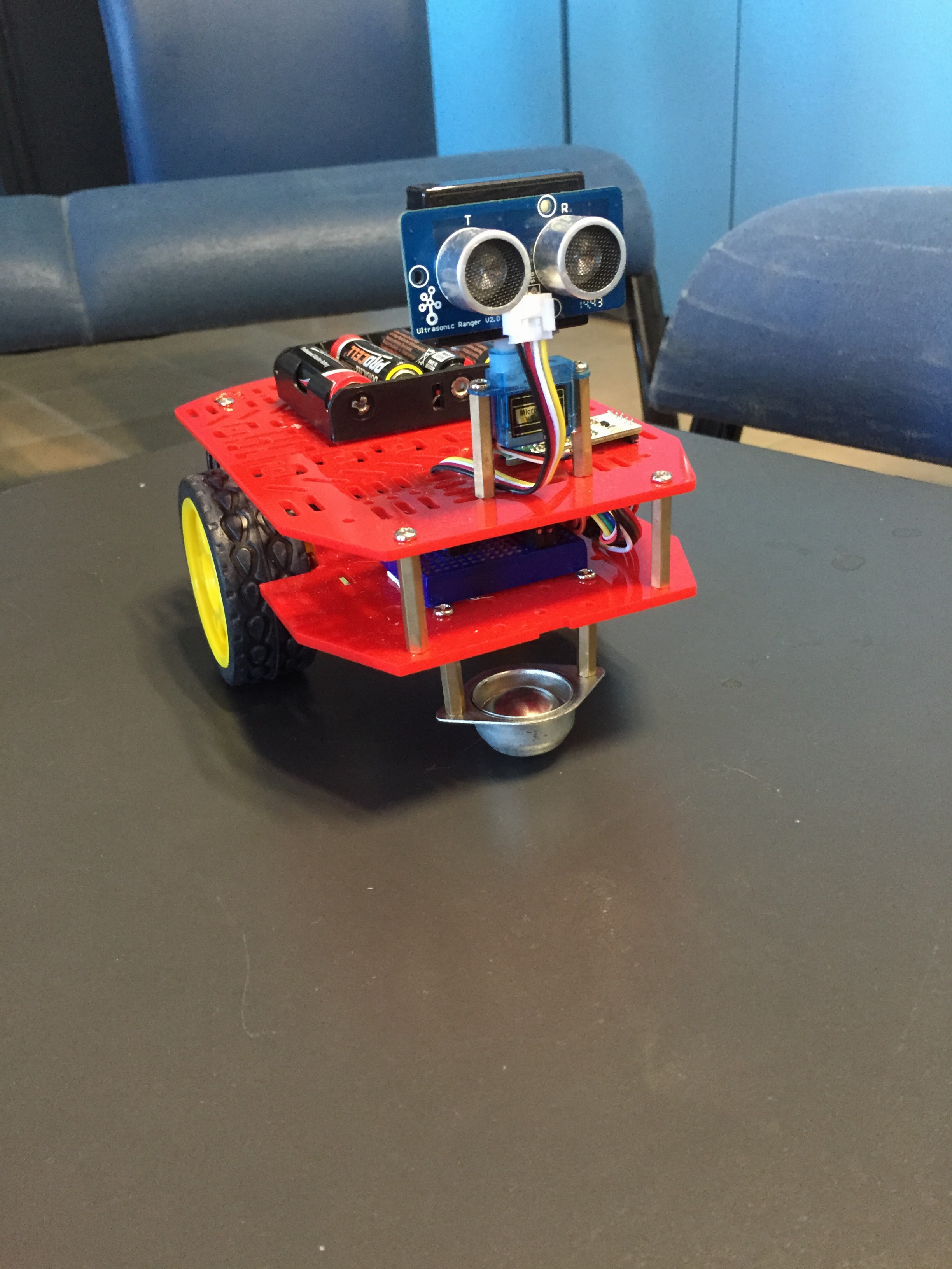
Notre robot. Notez que pour des raisons de performance, nous avons finalement utilisé 8 piles de 1.5V au lieu de 4 sur la photo.

Superbe projet découvert sur Arte. J’aimerai savoir si le code arduino est disponible quelque part , Merci.