
Ce projet a été réalisé dans le cadre du projet développement du second semestre de la scolarité à Télécom Bretagne par ALARY Théo, BENZHA Omar, KHAIR Abd-elhadi et YU Chendi. Nos tuteurs qui nous ont aidé tous au long du projet sont KEROUEDAN Sylvie et GROLEAT Tristan.
![IMG_0294[1]](http://telefab.fr/wp-content/uploads/2013/05/IMG_02941.jpg)
CONTEXTE
Nous avons construit un robot qui tient dans une boule. Le robot se déplace en faisant rouler la boule de l’intérieur à la manière d’un hamster. Il utilise les capteurs pour percevoir l’environnement à travers la boule. Grâce aux techniques de la robotique automatique, nous avons programmé un robot qui interagit avec l’environnement de manière fiable. Notre robot ne connaît l’environnement dans lequel il va se mouvoir, il s’adapte grâce à une interaction directe.
ARCHITECTURE
Au niveau de l’architecture mécanique nous avons utilisé :
- Une boule
- Deux roues
- Un support en bois pour la batterie et le circuit électronique
- Un tube cylindrique pour maintenir le robot droit
Au niveau de l’architecture électronique nous avons utilisé :
- Deux batteries (9V)
- Un capteur infrarouge SHARP
- Une carte Arudino UNO
- Un régulateur de tension L78S05
- Un détecteur de positionnement à bille
DEVELOPPEMENT DE LA SOLUTION
I/ La stratégie
L’Arduino UNO est le composant essentiel de l’architecture informatique du robot. Il contient le code principal du robot, reçoit les données du capteur et gère les actionneurs en conséquence. L’Arduino UNO contient le code du déplacement et de l’asservissement. L’asservissement permet la gestion des obstacles. S’il y a un obstacle détecté l’information est remontée au déplacement pour contourner l’obstacle. Grâce aux données recueillies par le capteur nous décidons si le robot continue d’avancer ou s’il retrousse chemin pour éviter un obstacle. Notre hamster possède deux roues, chacune d’entre elle est reliée à un moteur dont la vitesse est réglable. Nous pouvons ainsi aisément le faire tourner, avancer ou reculer.
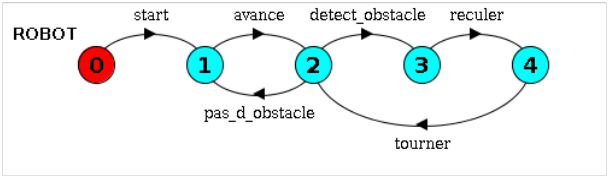
Schéma fonctionnel de l’algorithme régissant le robot
En ce qui concerne les codes utilisés : – code servant au test des servomoteurs : https://github.com/Theoalary/RobotHamster/blob/7b2a63751fb6b9f4834dff1f597b68fb487f7af3/Motor-test
– code servant au test principal : https://github.com/Theoalary/RobotHamster/blob/56208828e1903ac979f005fe43d8bc35258248d7/Test-principal
II/ Développement électrique
Pour le circuit électronique, il a fallut tous d’abord tester toutes les soudures et vérifier les tensions spécifiques aux bornes de chaque composant.
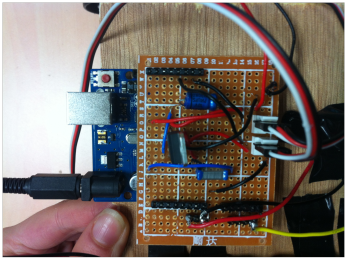
Le circuit électronique
Nous avons aussi testé les servomoteurs. Pour cela, il faut observer le comportement de la tension moyenne entre les 2 bornes des moteurs : la masse & la borne du signal, en fonction du rapport cyclique du PWM et du niveau logique de « SENS ».
III/ Développement mécanique
Tous d’abord, pour assurer la mobilité et stabilité du robot nous avons choisi dans un premier temps la configuration représentée dans la figure ci dessous.
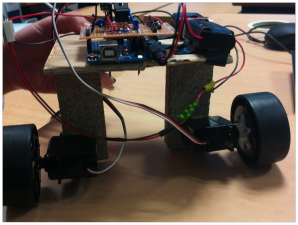
Premier prototype du robot. On peut y voir les deux servomoteurs auxquels sont accrochés nos deux roues. Au dessus on aperçoit l’arduino Uno et la carte électronique du robot.
Nous avons ensuit réduit notre robot pour qu’il tienne dans la boule. De plus, pour la stabilité de celui-ci à l’intérieur de la boule nous avons ajouté un tube cylindrique en guise de troisième roue. Les roues initiales n’adhéraient pas assez le plastique de la boule, nous avons donc ajouté des bandes de caoutchouc sur les roues se qui permet plus de frottements.
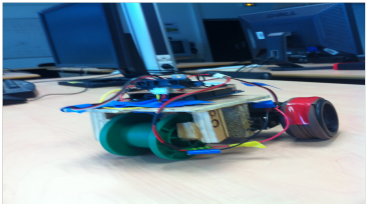
Prototype final du robot
